- Aze,
Bonjour 
Je souhaite réaliser une voiture téléguidé. Je pense utiliser un raspberry pi et/ou un arduino concernant le contrôle. J'ai pensé à ça pour les composants :
| Nom | Lien |
|---|---|
| Moteur | http://www.selectronic.fr/moteur-mfa-re-380.html |
| Roue | http://www.selectronic.fr/roues-robot-79x20-917d-2505.html |
| Direction | http://www.selectronic.fr/gws-servomoteur-micro.html |
Pensez vous que le servo-moteur pourra faire tourner les roues avant ? Je ne le trouve pas, quel est l'angle de rotation ?
Le diamètre des roues étant de 7.9 cm, le périmètre est donc 7.9 X pi = 24.8 cm, la vitesse des moteurs de 19 000 tours par minute, en prenant une marge, en prenant 15 000 tours par minute, 15000 X 24.8 = 372278 cm = 3722 m par minute, soit 223 km/h si je ne me trompe pas. C'est pas un peu élevé  ?
?
+1
-2




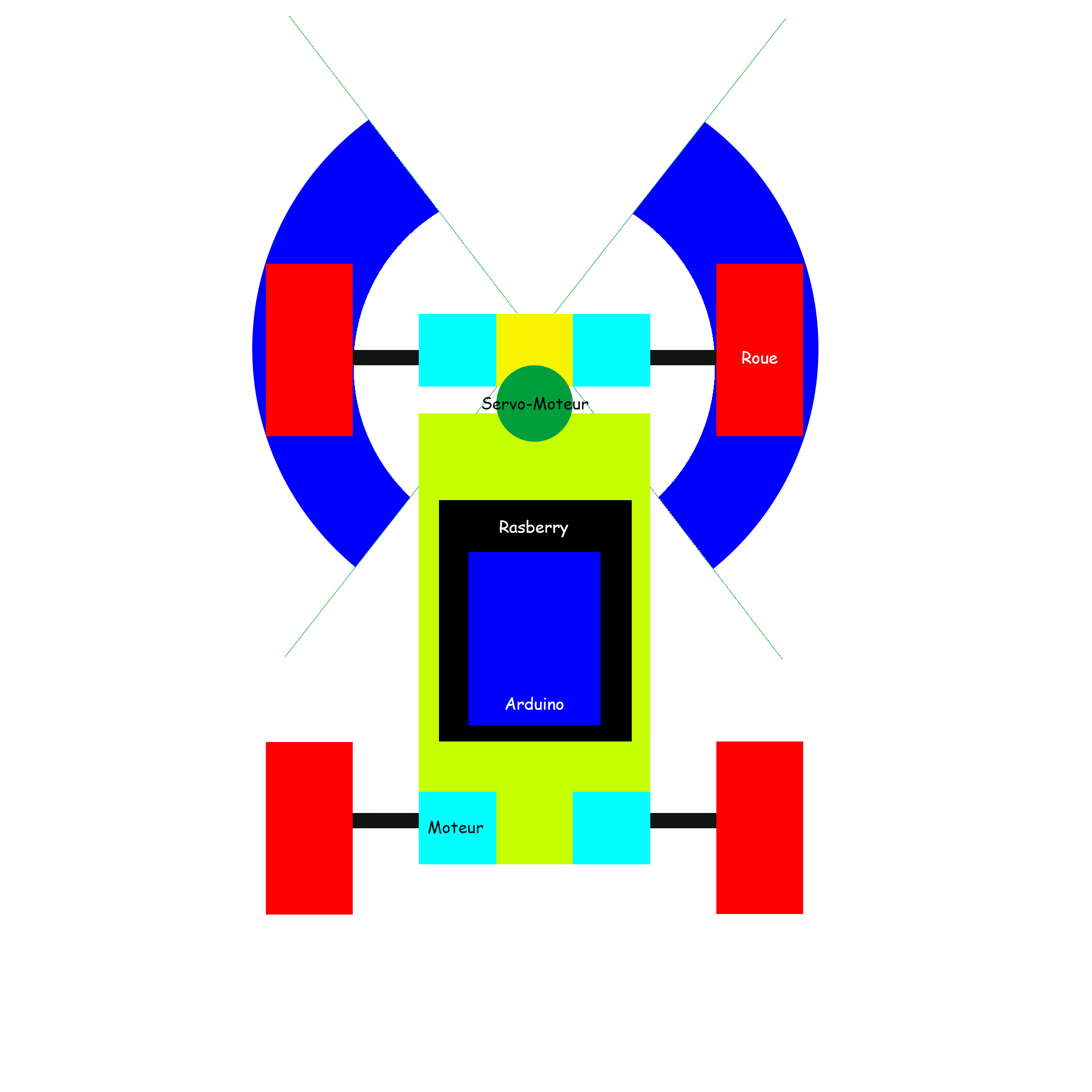 à l'avant, il n'y a pas de moteur.
Le bleu foncé à l'avant représente le mouvement possible des roues
à l'avant, il n'y a pas de moteur.
Le bleu foncé à l'avant représente le mouvement possible des roues