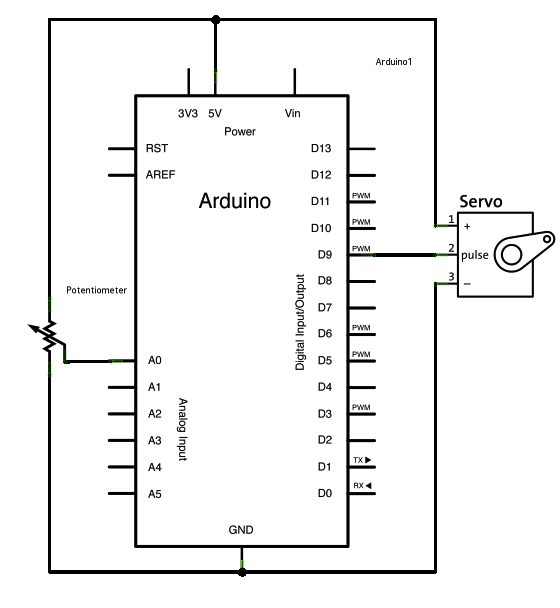
Bonjour, je suis en train de chercher à programmer l’arduino avec un capteur sonore et un servo; pour que celui ci se déclenche à l’arrivée d’un son. ça marche à peu près même si je ne comprend pas tout ce que je fais. le programme est très court et ne répond pas toujours correctement;
ceci dit, j’ai un soucis pour conserver l’angle du servo : capteur HIGH angle 120 capteur LOW angle 10; le probleme est en cas de bruit continu, le servo refait sans cesse sa boucle pour aller à 120. il ne reste pas en continu tant que le capteur est HIGH; si quelqu’un à un petit temps pour m’aider..ce serait cool.
voici le micro programme qui ne doit pas être adapté j’imagine :
include <Servo.h>
const int capteur =0; int pinServo=2; Servo servo1;
void setup() { pinMode(capteur, INPUT); servo1.attach(pinServo); }
void loop() { if(digitalRead(capteur)== LOW)
{ servo1.write(10); delay(70); }
if(digitalRead(capteur)== HIGH) { servo1.write(120); delay(70); } }