
Bonjour à toutes et à tous,
Je publie pas très souvent des trucs par ici et du coup, pour une fois, pourquoi pas ? Je viens de finir mon master en computer sciences à l’université de Fribourg et si je vous dis ça c’est pas pour vous raconter ma vie, mais parce que c’est un peu l’objet de ce billet ;).
J’ai fait mon travail de master dans le domaine de la data visualization appliquée aux modèles de deep learning. Je vais probablement publier un papier sur le sujet dans les mois qui viennent, mais en attendant, je vais montrer un peu ce que j’ai fait, parce que je trouve ça cool et que ça me ferai plaisir d’avoir des retours d’utilisations.
Donc le projet consiste globalement à faire un outil de visualisation (un programme quoi) qui permet d’essayer de mieux comprendre ce qui se passe dans un réseau neuronal profond. C’est un sujet super vaste, d’autres outils existent, on sait pas trop si on peut vraiment expliquer des choses dans le domaine grâce à la visualisation. En bref, c’est assez passionant.
tl;dr
L’outil est cool, vous pouvez tester par vous-même.
Pour ceux qui ne peuvent pas attendre :
- Concrètement, de quoi parle-t-on ?
- DNNViz : on rentre dans le dur !
- Ça ressemble à quoi ?
- On peut voir quoi au final ?
Concrètement, de quoi parle-t-on ?
Je vais pas faire un article sur qu’est-ce que c’est la data visualization et le deep learning. Ce serait trop long, trop chiant et il y a beaucoup de ressources sur internet.
Si vous savez ce que veulent dire "deep learning" et "data visualization", vous pouvez allègrement sauter cette section.
Donc brièvement, le deep learning. C’est un bon gros mot à la mode actuellement. Ça fait parti du machine learning et plus généralement de l’intelligence artificielle. En très (très) gros, c’est des techniques, qui permettent actuellement de résoudre des tâches très difficiles à traiter avec de l’informatique classique. Genre la reconnaissance d’image, le NLP (reconnaissance de texte) mais aussi la prise de décision dans des jeux (salut à toi, jeu de Go).
Le deep learning, c’est pleins de neurones (neurones informatiques, c’est un modèle pas très fidèle de nos bons vieux neurones) organisés en couches (on parlera plus volontiers de layers) qui, au terme d’un (relativement) long apprentissage, finissent par organiser l’information qu’ils contiennent et réussissent plutôt bien à "inférer" des résultats. Le truc, c’est que si on commence à comprendre de mieux en mieux comment ça marche à l’intérieur, il faut bien le dire, on capte encore pas grand chose. La recherche est en partie basée sur des essais/erreurs et on peut souvent entendre le terme black box (boîte noire) pour définir l’intérieur du réseau neuronal.
Et la data visualization dans tout ça ! Hein ? Alors l’idée de la visualisation de données, c’est de prendre plein de données (mais genre vraiment beaucoup) et d’essayer de les représenter pour qu’on puisse, éventuellement, y voir des patterns. (De nouveau c’est une explication au bulldozer.)
Et du coup. Comme le deep learning, au final, c’est beaucoup de données. Et que la data viz, ça bosse avec beaucoup de données. Les deux devraient plutôt bien s’entendre.
Comme je l’ai dit dans l’introduction, il y a déjà pas mal de recherche dans ce domaine et plusieurs outils intéressants sont disponibles si vous voulez vous amuser. On peut citer bien sûr Tensorboard1 ou ActiVis2 qui sont des dashboards de visualisations. Mais voici également deux outils que je trouve très intéressants: ReVACNN3 et DeepViz4.
J’ai fait un état de l’art beaucoup plus approfondi dans mon travail et si quelqu’un est vraiment intéressé par le domaine, je pourrais lui en passer une copie (en anglais). Bref, voilà pour le contexte.
-
tensorflow.org/guide/summaries_and_tensorboard
↩ -
Minsuk Kahng, Pierre Y. Andrews, Aditya Kalro, and Duen Horng Chau. ActiVis: Visual Exploration of Industry-Scale Deep Neural Network Models. arXiv:1704.01942 [cs, stat], April 2017. arXiv: 1704.01942.
↩ -
Sunghyo Chung, Cheonbok Park, Sangho Suh, Kyeongpil Kang, Jaegul Choo, and Bum Chul Kwon. ReVACNN: Steering Convolutional Neural Network via Real-Time Visual Analytics. page 8.
↩ -
Jason Yosinski, Jeff Clune, Anh Nguyen, Thomas Fuchs, and Hod Lipson. Understanding Neural Networks Through Deep Visualization. arXiv:1506.06579 [cs], June 2015. arXiv: 1506.06579.
↩
DNNViz : on rentre dans le dur !
Concrètement, mon projet est un outil qui va permettre de visualiser interactivement les activations des neurones pour des modèles de classification d’images (ça devrait pouvoir être générique et marcher pour n’importe quel type de réseau neuronal, mais c’est pas sûr). En très bref (à nouveau, et j’en suis désolé, mais le sujet est quand même cossu) quand on donne en entrée une image à un modèle (un réseau neuronal), certains neurones vont "s’allumer" plus que d’autres. C’est ce qui fait qu’en fonction d’un input, un réseau va prédire un output.
Des outils de ce genre existent déjà, évidemment. Mon travail a porté sur différents points qui me semblaient prometteurs. L’outil permet notamment de visualiser :
- la structure générale de réseaux neuronaux (très) profonds (genre les derniers modèles de la littérature, type ResNet, GoogleNet, DenseNet par exemple), alors que la plupart des outils précédents se cantonnent à des réseaux plus "classiques" et petits (la faute à la grande quantité d’info à afficher);
- l'évolution de l’état interne du réseau durant l’entraînement (là, il me semble, c’est totalement nouveau);
- les activations selon un input (une image en entrée) mais aussi selon des inputs agrégés par classes ou même agrégés sur l’ensemble du dataset;
- une comparaison de différents inputs entre eux.
Plus spécifiquement, mon outil se décompose en deux parties :
- Le backend, une task DeepDIVA (j’explique juste après) qui permet, soit de capturer les activations d’un modèle entraîné d’après un dataset donné, soit de capturer les activations à intervalle régulier pendant l’entraînement d’un modèle d’après un dataset donné;
- Le frontend, l’outil de visualisation proprement dit, qui consomme l'output produit par le backend (un dossier qui contient du
JSON) et qui permet une exploration interactive de la visualisation.
Voilà (et c’est déjà pas mal).
Un mot sur les outils utilisés
Et oui ! Il y a pleins de développeurs ici 
DeepDIVA
DeepDIVA1 est un projet open-source de framework pour du deep learning. En fait, il est basé sur PyTorch (un framework de deep learning en python). C’est une sorte de framework pour un framework. Ça a été développé dans le même labo que mon projet Il a pas mal d’avantage, mais notamment, il propose : des modèles pré-écrits, un système de tasks modulaires et surtout, il a été conçu pour pouvoir reproduire des expériences de deep learning (basé sur l’usage de seeds explicites).
Le backend, vous l’aurez compris, est une task dans DeepDIVA.
ElectonJS + VueJS
Là-dessus, je fais vraiment court. La visualisation en elle-même est faite sur ElectronJS et VueJS. (Oui, c’est plutôt court.)
-
Michele Alberti, Vinaychandran Pondenkandath, Marcel Wrsch, Rolf Ingold, and Marcus Liwicki. DeepDIVA: A Highly-Functional Python Framework for Reproducible Experiments. arXiv:1805.00329 [cs], April 2018. arXiv: 1805.00329.
↩
Ça ressemble à quoi ?
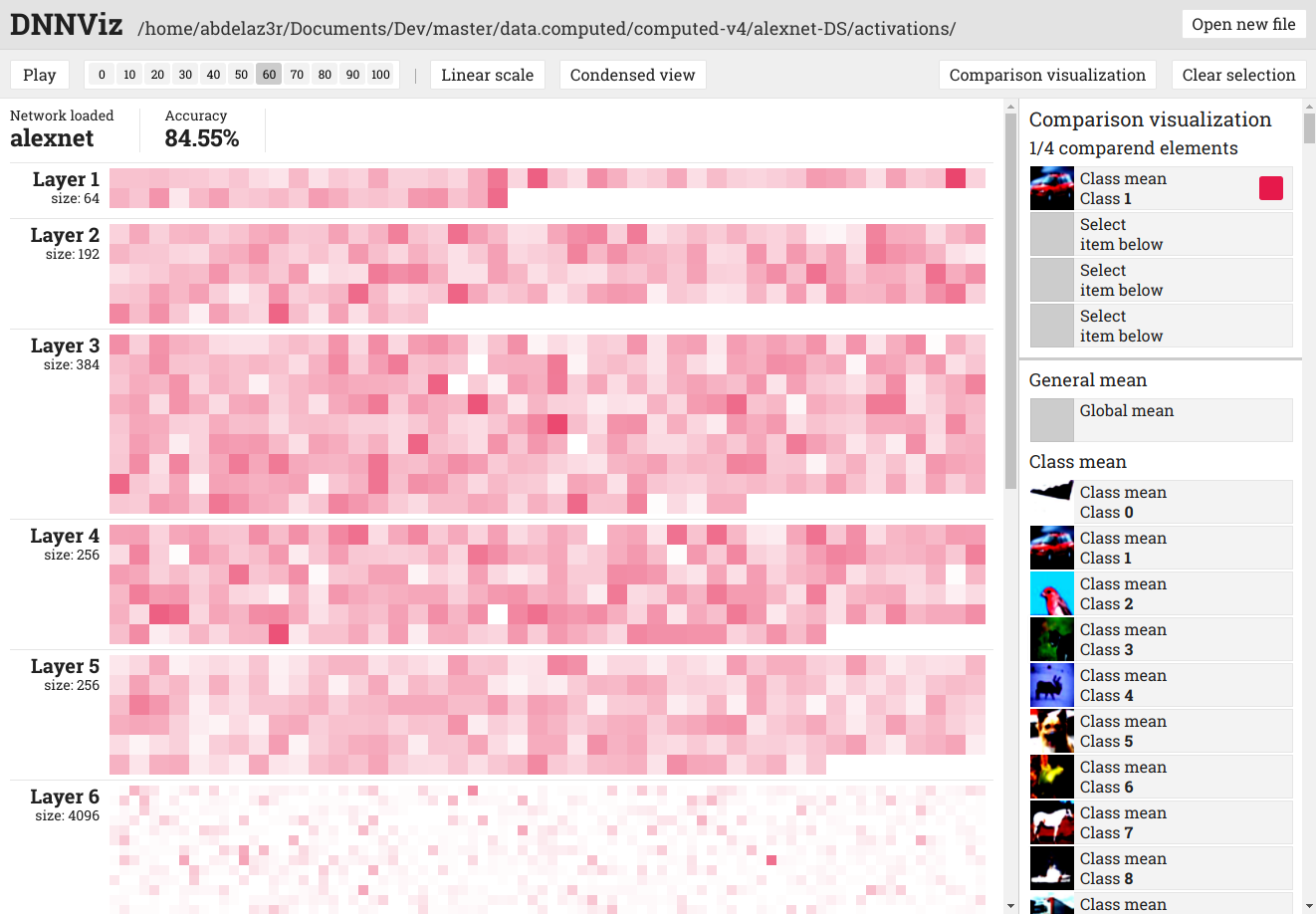
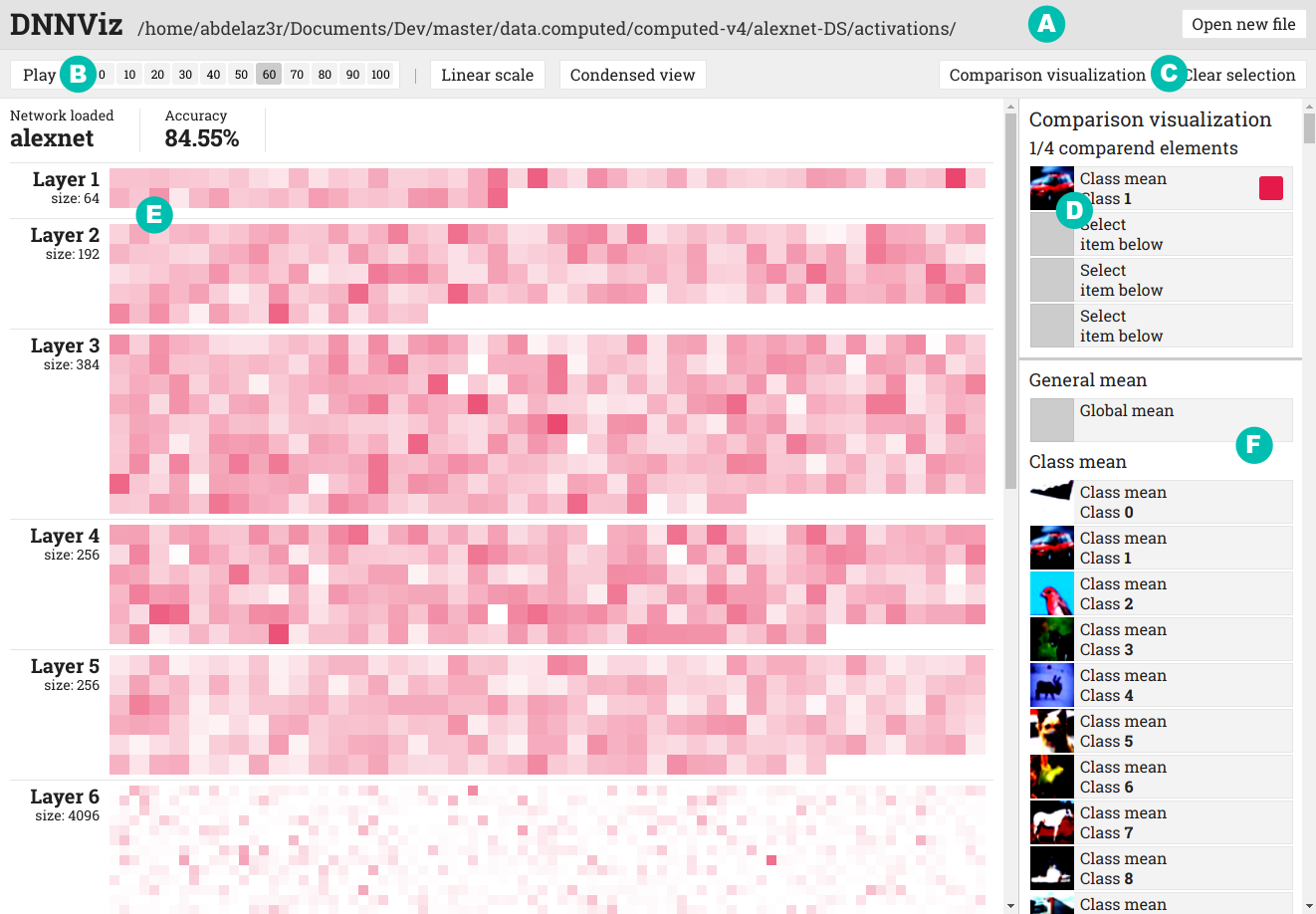 Figure : DNNViz. A Panneau des fichiers ouverts, B Panneau du contrôle de la visualisation, C Panneau de sélection du mode de visualisation, D Panneau de la sélection, E Visualisation, F Panneau de la liste des inputs.
Figure : DNNViz. A Panneau des fichiers ouverts, B Panneau du contrôle de la visualisation, C Panneau de sélection du mode de visualisation, D Panneau de la sélection, E Visualisation, F Panneau de la liste des inputs.
Bon, laissez-moi vous expliquer un peu ce qu’on voit.
Ici, on visualise l’agrégation de tout les inputs de la classe 1 (automobile) d’un réseau neuronal AlexNet entraîné sur CIFAR-10. Plus précisément, on visualise l’état des activations pour cet input à l'epoch 60 (l’entraînement va de l'epoch 0 à l'epoch 100). Sur la visualisation proprement dite, on peut voir la liste des layers (couches) du modèle. Chaque carré de couleur est, dans le cas d’une couche convolutionelle, la compression d’une feature map, dans le cas d’une couche classique, un neurone. Un carré presque blanc représente une activation moyenne (je rappelle qu’il s’agit de l’agrégation d’un ensemble d'inputs) presque nulle alors qu’un carré tout à fait rouge représente une activation moyenne très forte.
Bon, j’espère que vous avez bien tout suivit. Parce que maintenant, on rentre dans le dur !
On peut voir quoi au final ?
Comme ce billet commence déjà à être trop long, je ne vais pas présenter en détail les possibilités offertes par l’outil. Je vais juste vous montrer deux cas intéressants avec des résultats en images
Network pruning
Donc. Le network pruning. Grosso modo, c’est le fait de "compresser" un réseau neuronal en enlevant les neurones qui ne servent à rien (après ou pendant l’entraînement). C’est une technique qui permet de réduire la taille (et donc la complexité) d’un modèle.
Removing unimportant weights from a trained network to improve generalization, simplify networks, reduce hardware or storage requirements, increase the speed of further training, and in some cases enable rule extraction.1
C’est quelque chose d’assez connu. Juste en dessous, je vous montre la visualisation générale (c’est-à-dire que l'input affiché correspond à la moyenne de TOUTES les images du dataset). Ce genre de visualisation permet justement de voir, en quelques sortes, l’occupation du réseau. Dans un réseau dont l’information est bien répartie, presque tous les neurones d’une couche devraient (dans le cas de cette visualisation, générale donc) avoir une activation moyenne haute (visuellement ça voudrait dire des couches "très rouges"). Après bien évidemment ça va dépendre d’autres facteurs, de la nature du dataset notamment.
Le modèle proposé ici est AlexNet. Un réseau qui comprend 5 couches convolutionelles suivies de 2 couches fully connected (totalement connectées). Or, on sait que ces deux dernières couches contiennent, dans ce cas, trop de neurones, et alourdissent l’apprentissage.
L’image ci dessous montre les couches 6 et 7 de modèle, à la 200ème epoch.
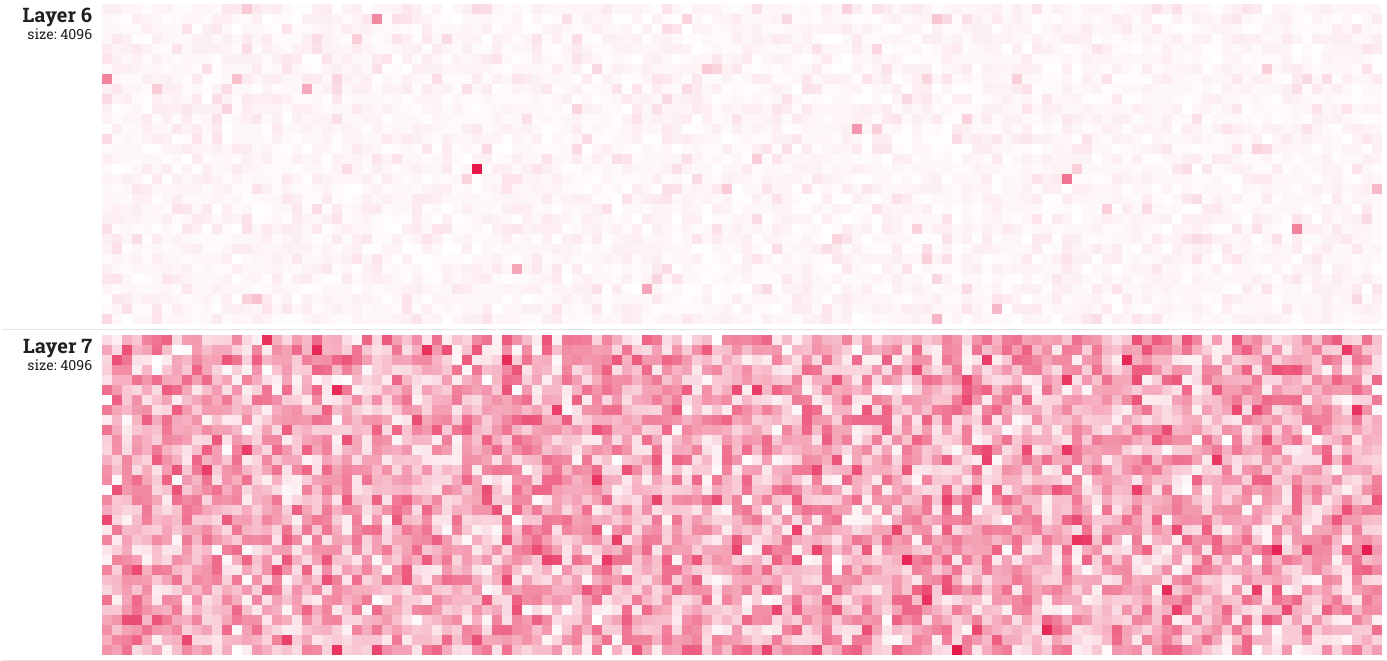
On peut voir que le layer 6 est totalement inutile. Quelques neurones sont hyper-activés et le reste est mort. Ci-dessous, sur un autre réseau, vous pouvez voir l’évolution sur 200 epochs des couches 4, 5 et 6.

Adversarial Attack Detection
Alors. Tout d’abords, un peu de théorie.
Une adversarial attack, c’est la manipulation d’une image, par exemple, de telle sorte que cette manipulation ne soit pas détectable par un être humain, mais qu’elle change la classification donnée par le réseau neuronal.
Pour montrer vite fait les implications que ça pourrait avoir. Imaginons qu’on crée une image d’un signal routier qui, pour nous, ressemble comme 2 gouttes d’eau à un vrai signal routier (genre "limitation de vitesse à 20 km/h") mais qui, pour un algorithme d’IA embarqué dans, mettons, une voiture autonome, signifie "limitation de vitesse à 120 km/h". Je vous laisse imaginer le problème.
Si dessous, vous pouvez voir, à gauche, une image correctement classifiée (temple maya ou quelque chose dans ce genre), au centre, la différence entre les deux images et à droite, l’image truquée que le modèle classifie mal.
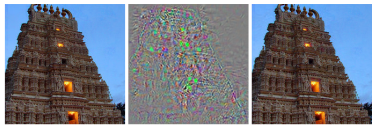
Figure : Exemple d'adversarial images générée pour un modèle AlexNet2
Data tempering
Mes collègues de labo ont bossé sur le dataset tempering (l’altération de dataset)3. Grosso modo, c’est une procédure pour faire une modification sur toute une classe du dataset. La modification n’est pas détectable avec les métriques classiques (accuracy, confusion matrices, …) et permet de corrompre des datasets qui, par la suite, peuvent être laissé en libre accès sur internet.
On a fait une petite expérience. Ils m’ont donné 2 datasets et m’ont dit d’entraîner 2 réseaux avec exactement les mêmes paramètres. Et puis ensuite de voir comment ça se voyait sur l’outil de visualisation.
Cette image montre la visualisation de la classe 1 sur l’ensemble du réseau neuronal, totalement entraîné. La moitié gauche montre le réseau entraîné sur le premier dataset, la partie droite, le réseau entraîné sur le deuxième dataset.
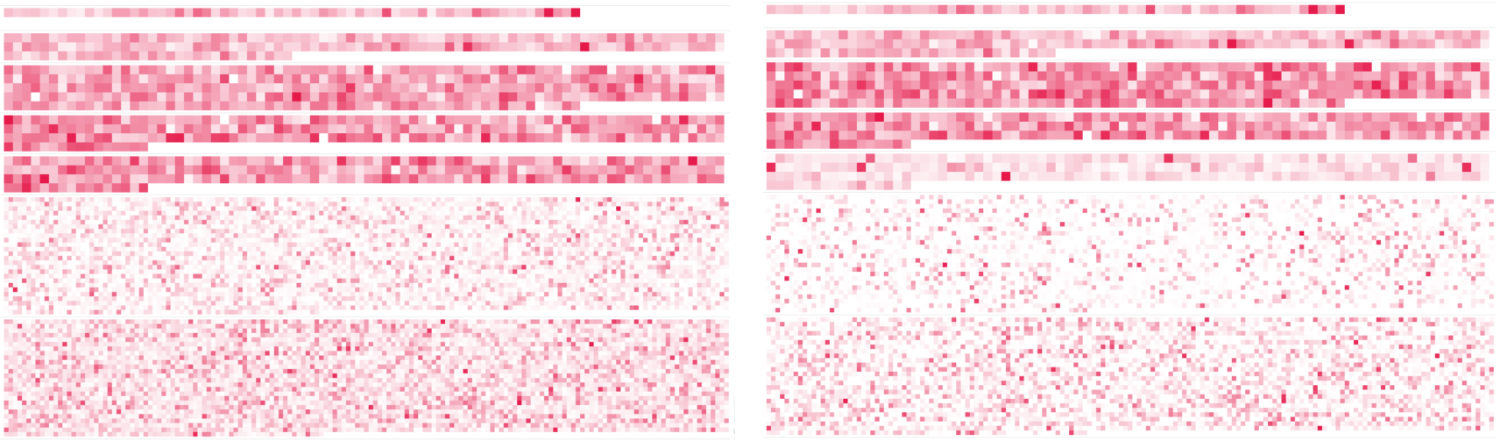
Vous n’avez rien vu ?
L’image suivante montre, suivant les mêmes conditions, le layer 5. A, B, C montrent respectivement la classe 0 (airplane), 1 (automobile) et 2 (bird) sur le premier dataset. D, E, F montrent la même chose, mais sur le deuxième dataset.
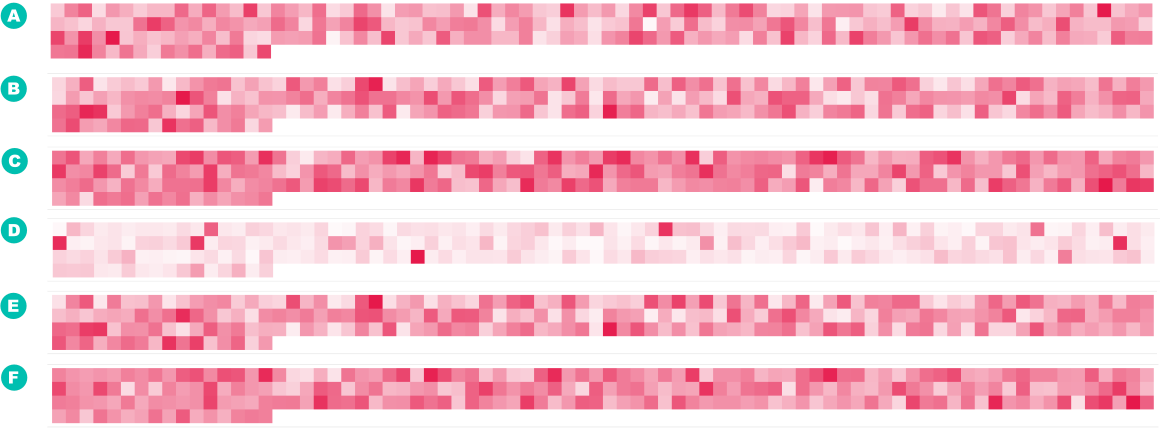
Selon vous, quel est le dataset altéré et, plus précisément, quelle classe est altérée ?
-
B. Hassibi, D. G. Stork, and G. J. Wolff. Optimal Brain Surgeon and general network pruning. In IEEE International Conference on Neural Networks, pages 293–299 vol.1, March 1993.
↩ -
Marco Tulio Ribeiro, Sameer Singh, and Carlos Guestrin. ”Why Should I Trust You?”: Explaining the Predictions of Any Classifier. In Proceedings of the 22Nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, KDD ’16, pages 1135–1144, New York, NY, USA, 2016. ACM.
↩
Bon, ce billet est finalement beaucoup trop long. Alors je m’arrête là. Je mettrais probablement le lien de l’article quand il sortira (s’il sort) si certains d’entre vous sont intéressés.
Pour ceux qui pratiquent le deep learning au quotidien (j’imagine qu’il y en a), vous pouvez trouver toutes les infos sur le site de DeepDIVA. Malheureusement, il n’y a pas encore de tutoriel pour utiliser la task. Sachez que cette dernière s’appelle process_activation. Je vous mets ici deux exemples de commande à lancer dans DeepDIVA pour capturer les activations et produire l’output utilisable.
# Train and process
python template/RunMe.py --runner-class process\_activation --output-folder \_log --dataset-folder _dataset/CIFAR10 --model-name alexnet --ignoregit --train --epochs 200 --process-size 200 --process-every 25 --save-images
# Process only
python template/RunMe.py --runner-class process\_activation --output-folder \_log --dataset-folder _dataset/CIFAR10 --model-name CNN_basic --load-model _models/cnnbasic.pth.tar --ignoregit --process-size 500 --save-images
Les sources de l’outil de visualisation sont ici github.com/DIVA-DIA/DeepDIVA-DNNViz et des packages déjà prêt pour les différents OS sont aussi disponible.
Voilà, c’est encore un peu le chantier. Il y a encore des bugs. Mais c’est déjà marrant.
Bonne soirée à vous




 My bad…
My bad…