Bonjour,
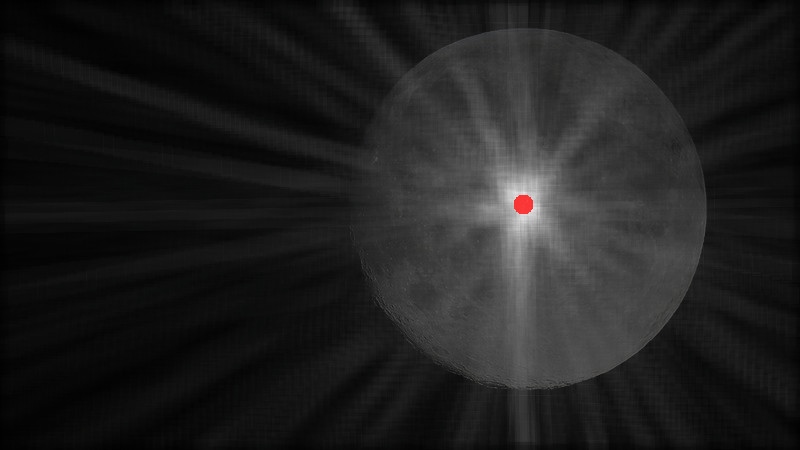
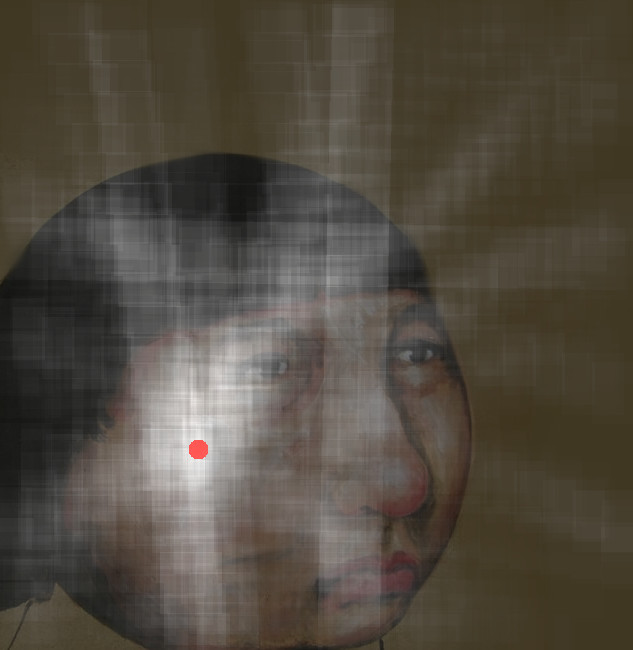
Avec un ami, nous développons un petit logiciel en Python qui permet de nous donner le rayon estimé de la Lune (ou tout autre corps céleste de forme circulaire) à partir de points placés par l’utilisateur. Une fois les points placés, nous utilisons la méthode des moindres carrés pour avoir le cercle. Ce qui nous donne quelque chose comme ça :

On souhaiterai avoir maintenant un algorithme permettant au programme de placer lui même les points. On a regardé avec OpenCV et Hough Circle Transform mais le problème d’OpenCV c’est qu’il est assez compliqué à installer pour partager ce logiciel (il est sensé être utilisé par des astronomes débutants).
Quel est le meilleur moyen de placer les points (5–6 points) définissant le contour de mon objet ? Il faut vraiment placer les points et pas trouver tout de suite le rayon (ce que fait OpenCV).
Merci pour vos réponses !