
Bien le bonjour (enfin bonsoir) à tou(te)s.
Me voilà avec un nouveau projet !
Bon, pour ceux qui me connaissent un peu ils me demanderont :
Mais. Tu arrêtes ton GLaDOs ????
Ce que je vais répondre oui et non. Pour le glados, le prototype est fini et fonctionnait. Du coup je l'ai mis en pause, mais je compte le refaire en bien plus propre et plus fini. Mais j'ai aussi envie de changer d'air et plein de projets en tête (une radio vintage controlable à la voix, de la reconnaissance, des projets scolaires, de la contribution à faire, …), bref du coup je pars sur un des projets robotique qui me tenait à coeur : un hexapode !
Un projet, avec ses défis :
Je n'ai pas encore réalisé de joli design pour présenter ce projet, donc je vais vous laisser imaginer. Je souhaite réaliser un mix entre :

LE A-Pod de Zenta
et

pour la tete. Et le tout avec plein de leds sur les pattes et un petit coté veuve noire. Ok je dois avouer que le tout doit etre dur à imaginer, mais c'est super clair dans ma tête, ça sera joli selon moi et je vous ferais de jolis dessins :).
Bien sûr, je me pose quelques défis :
- Le robot devra être entièrement démontable, imprimable par n'importe qui et bien documenté
- Je dois utiliser du matériel le plus libre possible.
- J'ai envie de traiter des algorithmes drôles. Par exemple T-resilience, ou alors mon premier défi : lever l'hexapode le plus haut possible, en déterminant les positions des moteurs via de multiples simulations (on génère une série de test, on simule, on évalue, on regénère, etc.)
Où j'en suis :
Côté design
Aucun visuel du projet n'a été réalisé. Par contre j'ai déjà commencé à prototyper une patte :
Côté Matériel
Je possède les leds et quelques moteurs, mais je n'ai pas encore réfléchi la façon la plus propre pour controler autant de LED RGB et de moteurs (21 moteurs, une quarantaine de LED RGB qui doivent etre indépendantes).
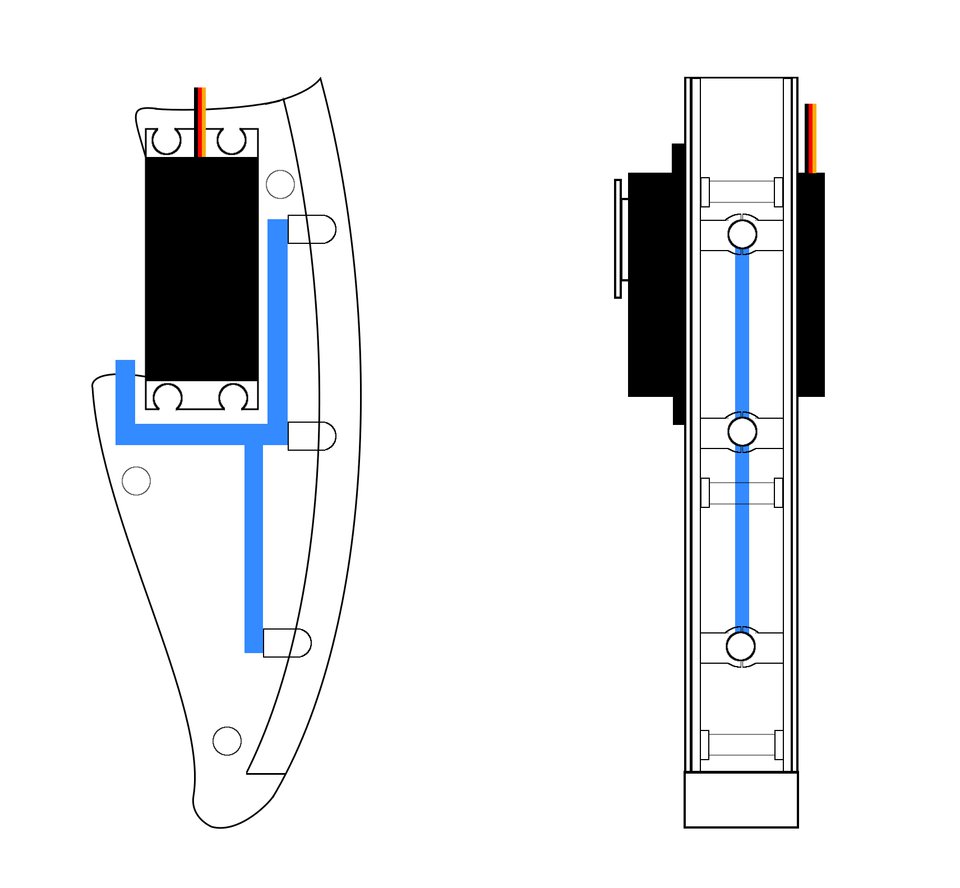
Par contre j'ai prototypé la pattes (2 fois, les pièces sont modélisées sous FreeCAD) :

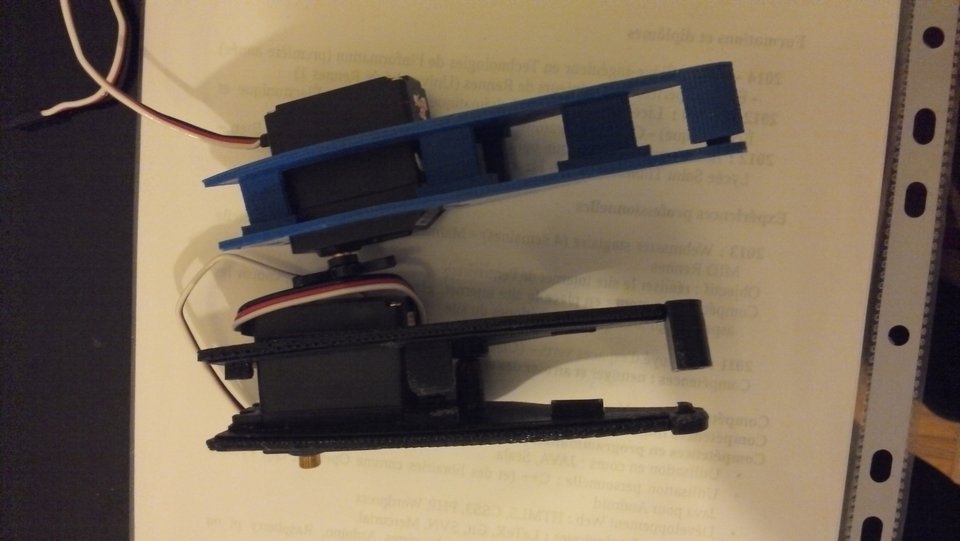 Il me manque les trous pour les 3 leds de cette partie, et les cylindres qui servent à relier pour le moment seront remplacés par des vis. Enfin il y aura du caoutchouc en bas de la patte pour l'accroche.
Il me manque les trous pour les 3 leds de cette partie, et les cylindres qui servent à relier pour le moment seront remplacés par des vis. Enfin il y aura du caoutchouc en bas de la patte pour l'accroche.
Côté logiciel
Je suis entrain de réaliser mon premier défi, c'est à dire de trouver la position parfaite des servomoteurs pour obtenir l'hexapode le plus haut possible. Mais je bloque en ce moment à l'utilisation de V-REP … Le reste ne devrait pas être un soucis.
Ce post sera édité régulièrement,
AmarOk


