Bonjour,
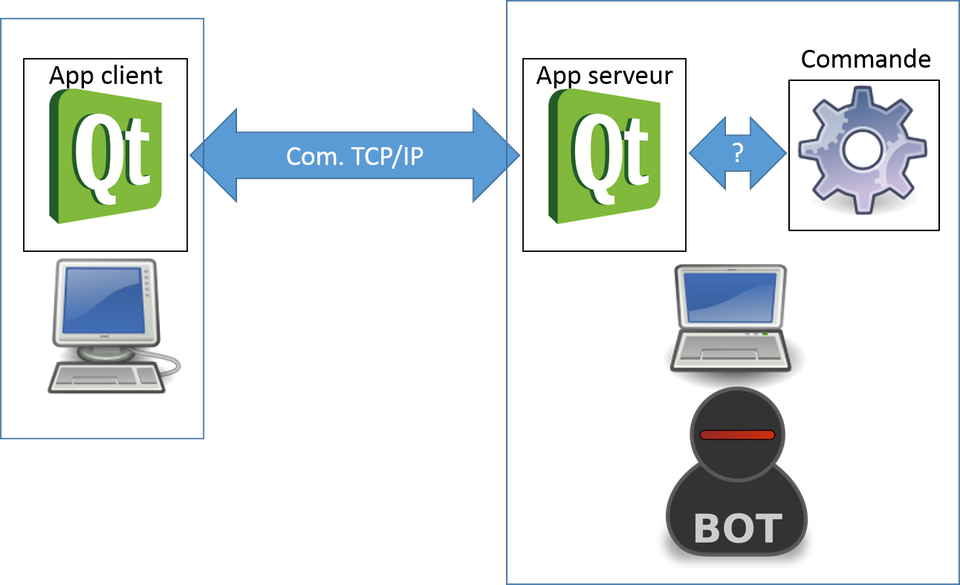
je voulais savoir s'il y avait un moyen de partager une (ou des) variable(s) entre deux programmes, pour pouvoir influencer le fonctionnement de l'un par l'autre ?
Je pensais faire ça avec des fichiers, mais l'exécution est un peu lourde (ouverture/fermeture) et c'est surtout beaucoup moins rapide ! (C'est dans l'optique d'arrêter une boucle infinie, donc il y aurait de nombreux appel au fichier)
Si vous avez une idée, merci d'avance !
+0
-0