
Bonjour,
Mon oncle est agriculteur et possède des vergers, organisés en rangs considérés rectilignes de pommiers. Pour en traiter le sol, il passe en tracteur dans les rangs avec une rampe qu'il peut plier et déplier à sa guise par verrin hydraulique. En agissant manuellement sur la commande, la rampe se retrouve souvent loin des troncs à cause de l'imprécision, ce qui fait qu'une bande au centre n'est pas traitée (le jet ne va pas assez loin). Son objectif est donc de faire en sorte que la rampe soit toujours à une certaine distance des troncs, assez proche pour tout traiter. Autrement dit, il faut suivre avec la rampe la ligne reliant deux troncs consécutifs.
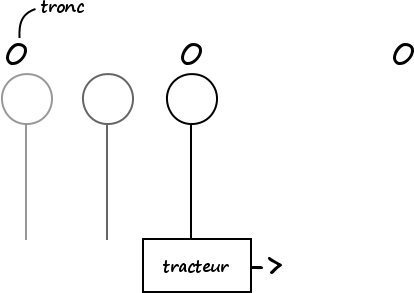
Sur ce schéma, la position est idéale, mais elle varie du fait des coups de volant. Pour pallier cela, on avait pensé utiliser un capteur de distance :
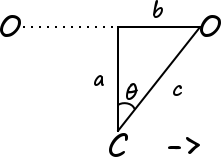
Avec $\theta$ de fixé, $c$ mesuré par le capteur, on en déduit $a$ (majoré par $0.6m$) et peut corriger la distance en conséquence. Seulement, $\theta$ dépend de l'orientation du tracteur (plus précisément, de la rampe) et on ne peut pas vraiment faire d'hypothèse dessus. En outre, ce système implique ne corriger la position que tous les troncs (espacés d'environ 2m) : il suffit de faire un écart juste après une mesure pour ne pas traiter le centre sur 2m (jusqu'à la mesure suivante).
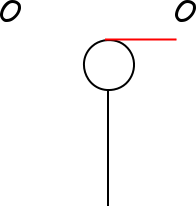
Du coup, on préfèrerait un autre moyen. J'avais pensé à travailler avec la présence plutôt qu'avec la distance : on place un capteur parallèlement à la direction d'avancement :

Mais comment distinguer les cas suivants :
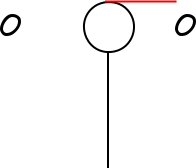
Auriez-vous des idées ? 
Merci.





