Les microphones ? On en utilise tous les jours : les téléphones, les interphones, les guitares, etc. Et pourtant sait-on vraiment comment ça fonctionne ?
Un microphone est un dispositif permettant de capter une onde sonore et de la « transformer » en signal électrique, comme un convertisseur en quelque sorte. En pensant au microphone on pense souvent à la musique et au chant, mais c’est aussi un élément de base de toutes les télécommunications modernes. C’est aussi un instrument de mesure important en sciences. Dans ce tuto nous suivrons le son dans tous ses états : l’onde sonore qui percute le micro, le signal électrique et sa propagation dans un câble. Nous nous intéresserons aussi à la construction d’un microphone et de son impact sur ses caractéristiques techniques.
Quelques formules sont données, mais aucune connaissance scientifique n’est vraiment préalable à la lecture de cet article.
Pour rendre l’article plus facile à lire, le terme microphone sera parfois remplacé par le mot micro, par apocope.
Ce tuto fait partie d’un CdS sur le thème du son.
De l'onde à l'électricité
Afin de bien comprendre comment fonctionne un microphone nous devons d’abord nous intéresser aux ondes qui constituent le son.
L’onde sonore
Quand un objet ou une personne émet un son, une onde de pression est émise. Cette onde est une onde longitudinale, c’est-à-dire que la perturbation de l’onde est dans la même direction que son déplacement. Imaginez une file de personne les une devant les autres (comme à la poste). Si vous poussez la personne devant vous celle-ci va s’équilibrer en poussant légèrement la personne devant elle. Vous obtenez l’équivalent d’une onde de pression longitudinale. Notez bien que dans cet exemple, les personnes qui composent la file ne se déplacent que très légèrement autour de leur position d’origine et retournent à leur position de départ une fois rétablies.
La propagation de l’onde est possible grâce au milieu (air, eau, etc.) dans laquelle elle évolue. Sans milieu, pas d’onde longitudinale et donc pas de son, c’est pourquoi si vous criez dans l’espace, personne ne vous entendra.  Le son se déplace grâce aux molécules présentes dans l’air, on dit que l’onde sonore est propagée par le milieu. En revanche, il faut bien comprendre que les molécules ne se déplacent pas en « suivant » l’onde, elles ne font que vibrer légèrement autour de leur position initiale, comme les personnes dans l’exemple précédant. La vibration se transmet de molécule en molécule, ce qui permet la propagation. Néanmoins, cette propagation n’est pas infinie, plus on s’écarte d’une source sonore moins on entend le son. Cela est cause par deux phénomènes :
Le son se déplace grâce aux molécules présentes dans l’air, on dit que l’onde sonore est propagée par le milieu. En revanche, il faut bien comprendre que les molécules ne se déplacent pas en « suivant » l’onde, elles ne font que vibrer légèrement autour de leur position initiale, comme les personnes dans l’exemple précédant. La vibration se transmet de molécule en molécule, ce qui permet la propagation. Néanmoins, cette propagation n’est pas infinie, plus on s’écarte d’une source sonore moins on entend le son. Cela est cause par deux phénomènes :
- La répartition de l’énergie de l’onde sur un front d’onde qui s’écarte de la source. Imaginez une enceinte posée dans un champ et qui émet un son. L’onde sonore se repartit dans toutes les directions autour de l’enceinte et peut-être représentée par une demi-sphère. Plus le temps passe plus l’onde se propage sur une grande surface, l’énergie par élément de surface diminue et tend vers zéro. C’est le phénomène de dilution de l’onde sonore dans le milieu. En s’éloignant suffisamment de la source on finit par ne plus entendre le son.
- L’atténuation de l’onde sonore par le milieu. La molécule qui composent le milieu de propagation opposent une petite résistance à la propagation de l’onde. Une partie de l’énergie de l’onde est ainsi perdue sous forme de chaleur. Ce phénomène est imperceptible à l’échelle humaine.
L’onde sonore possède deux propriétés importantes :
- Sa fréquence : il s’agit de savoir combien de fois l’onde oscille par seconde, la fréquence s’exprime en Hertz. Un Hertz est équivalent à un événement par seconde, dans notre cas une oscillation. Cette unité est équivalente à $ s^{-1} $ ou encore $ 1/s $. En musique cela correspond à la hauteur de note : on parle de basses fréquences pour les notes graves comme celles produites par une guitare basse. On parle de hautes fréquences pour les notes aiguës comme celle produites par un ukulélé.
- Sa puissance, c’est la mesure qui nous permet de quantifier le niveau sonore. Dans le domaine du son, l’unité la plus courante est le décibel.
Maintenant que l’on sait un peu mieux comment fonctionne une onde sonore, voyons le rôle du microphone.
Le micro, de l’acoustique à l’électrique
Nous avons une onde acoustique, mais nous souhaitons obtenir une information électrique (le signal). Le micro agit donc comme un convertisseur acoustique/électronique. Il existe deux grands types de micros, les micros statiques et les micros dynamiques. Le principe général est le même, nous détaillerons les différences par la suite.
Principe générique
Le micro contient une partie mobile, appelée membrane. Celle-ci est très légère et se trouve à l’avant du micro, afin de réagir à l’onde sonore. Quand celle-ci percute la membrane, cette dernière rentre en mouvement. En bougeant elle provoque une variation de courant, qui permet de former un signal électrique. L’énergie passe du domaine acoustique (onde) au domaine mécanique (mouvement de la membrane) puis au domaine électrique (signal).
Microphone électrodynamique
Dans un microphone dynamique la membrane est reliée à une bobine mobile se déplaçant aux alentours d’un aimant. Le déplacement de la bobine en fonction de l’onde sonore produit un courant, c’est le même principe que pour une dynamo de vélo ou une turbine de centrale hydro-électrique : l’induction électromagnétique. Il ne nous reste plus qu’à récupérer le signal aux bornes de la bobine pour avoir un signal sonore électrique.

Sur le schéma on retrouve en (1) l’onde sonore, qui percute la membrane (2), celle-ci déplace la bobine (3). Cette dernière se déplace autour d’un aimant (4) et génère un faible courant électrique, notre signal (5).
Ce type de micro est robuste et ne craint pas trop les chocs où les intempéries. Parfait pour les chanteurs de métal lors d’un orage en festival.
Microphone statique
Le microphone statique utilise globalement la même construction sauf que le montage bobine et aimant est remplacé par un condensateur. Pour pouvoir récupérer un signal sonore il faut alimenter le micro avec une alimentation électrique, couramment appelée alimentation fantôme. Celle-ci permet de polariser le circuit, de le mettre sous tension. Lors du déplacement de la membrane, la capacité du condensateur est modifiée, car elle dépend de l’espace entre ses armatures. De cette variation de capacité se produit une variation de signal électrique que l’on récupère aux bornes du circuit.
Pour ceux qui aiment les formules voici l’explication en équation de la variation de la capacité du condensateur.
Avec $C$ la capacité du condensateur, $S$ la surface des armatures, $e$ la distance entre les armatures et $\varepsilon$ la permittivité du diélectrique (une caractéristique des matériaux).
Une fois le condensateur construit $S$ et $\varepsilon$ sont des constantes, la capacité du condensateur est donc directement relié à l’écartement.
L’alimentation fantôme présente souvent une tension de 48V, norme couramment utilisée dans le milieu. Néanmoins, il est possible de rencontrer d’autres valeurs : 10 V, 12 V, 24 V. On note d’ailleurs que la tension de 48 V est plutôt une valeur repère, car en réalité la tension accepte doit se trouver entre 44 V et 52 V. Cette valeur de 48 V permet la transmission du courant sur des distances assez longues, de l’ordre de plusieurs dizaines de mètres en minimisant la déperdition d’énergie. Il s’agit de la même astuce que celle utilisée sur les lignes hautes tensions. Le côté pratique de cette alimentation est qu’elle se transmet sur le même câble que le signal, le câble XLR, vu en détails plus loin. Le courant électrique est alors fournit dans la majorité des cas par une table de mixage.
La valeur de 48 V est un héritage historique. En effet le premier studio à avoir commandé un nouveau micro avec une alimentation fantôme utilisait déjà cette tension pour son système d’éclairage d’urgence. Par économie cette valeur a donc été choisie.
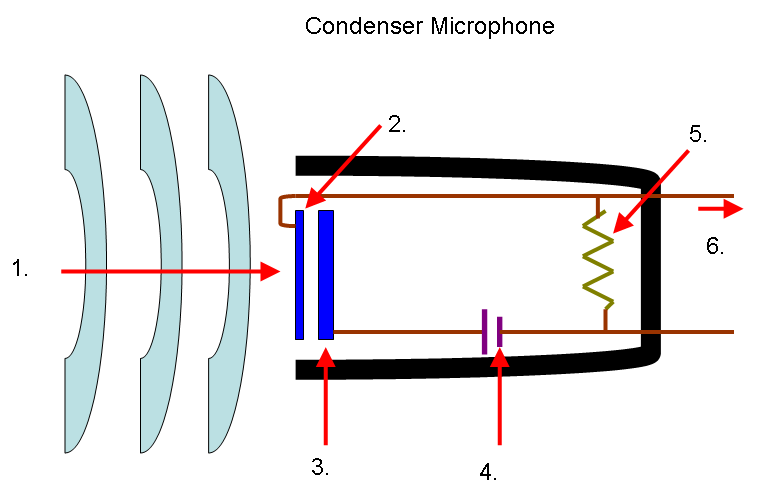
Dans ce schéma on retrouve l’onde sonore percutant la membrane avant (1 et 2). Celle-ci se déplace et modifie son écartement avec l’armature arrière (3) formant le condensateur. Tout le circuit est alimenté (4) et présente une résistance (5). On récupère aux bornes du micro notre signal (6).
Ce type de micro est souvent plus coûteux, car la réalisation de la membrane intégrée au condensateur est une opération complexe. D’autres part le champ électrostatique utilisé est plus homogène que le champ électrodynamique et permet un résultat sonore souvent de meilleure qualité.
Il existe en réalité d’autres types de micros (à ruban, électret, etc.), mais ils utilisent des principes similaires à ceux vus ci-dessus.
De la construction d'un micro
Pression acoustique et directivité
Nous avons vu dans la partie précédente que la membrane d’un microphone se déplace en fonction de la pression acoustique produite par une onde sonore. Pour que cela soit vrai il faut que notre onde sonore arrive d’un côté de la membrane alors que l’autre est soumis à une pression atmosphérique constante. C’est-à-dire un milieu qui ne réagit pas à la présence de l’onde. C’est le cas dans les micros à capteur de pression acoustique.
Les micros à capteur de pression
Avec ce genre de construction le micro réagit de la même façon qu’elle que soit la direction de l’onde. On dit que le micro est omnidirectionnel. Pour tout type de micro on peut dresser une courbe de sensibilité dans l’espace. Typiquement cela ressemble à ça.

Sur ce schéma on peut voir que le micro à une sensibilité en forme de O dans toutes les directions, on dit qu’il est omnidirectionnel, de la même sensibilité quel que soit l’origine spatiale du son. Ce type de micro est utile pour capter des sons d’ambiance (une gare, un repas, etc.), mais ne permettra pas d’isoler un bruit ou une voix dans un environnement.
Les micros à gradient de pression
Maintenant que se passe-t-il si on retire la partie derrière la membrane assurant la pression atmosphérique constante ? Imaginons qu’un son arrive sur le côté de la membrane, de façon perpendiculaire. La pression sonore va se repartir équitablement entre l’avant et l’arrière de la membrane, et celle-ci ne va donc pas bouger. Autrement dit, si quelqu’un parle sur le côté du micro, on ne l’entendra pas. Embêtant ? Eh bien non ! C’est un comportement très intéressant, car cela va nous permettre de choisir plus précisément ce que l’on souhaite capter et d’ignorer les bruits parasites. Ce type de micro est appelé bidirectionnel. Leur courbe de sensibilité est semblable à celle-ci.
Ce type de micro est bien adapté pour enregistrer deux personnes se trouvant face à face et ne parlant pas en même temps, comme à la radio par exemple.
Directivité
C’est bien beau ton système, mais tu me laisses uniquement le choix entre enregistrer une ambiance sonore ou deux personnes face à face. Pas très pratique…
Figurez-vous que nos amis les ingénieurs ont pensé à tous. Il est en effet possible de coupler les micros à pression et les micros à gradient pour obtenir d’autres types de micros. Il existe deux types de couplage pour réaliser des micros mixtes.
Le couplage mécanique
L’idée est de réguler la pression atmosphérique au niveau de l’arrière de la membrane pour que celle-ci ne soit pas complètement constante (micro omnidirectionnel) ni complètement dépendante de l’onde sonore (micro bidirectionnel). Cela est possible grâce à la création d’évents dans le corps du micro visant à laisser rentrer une partie de l’onde sonore. L’ingénierie de ces évents est très complexe et dépend notamment de la longueur d’onde, des matériaux utilisés, etc.
Le couplage électronique
L’idée cette fois-ci est de positionner deux capsules dans le micro : une capsule omnidirectionnelle et une bidirectionnelle. On ajoute alors les deux signaux captés en certaines proportions afin d’obtenir la directivité souhaitée. L´avantage de ce type de couplage est qu’il est souvent réglable sur le corps du micro.
Directivité
Grâce aux méthodes de couplage on arrive à obtenir des directivités différentes, c’est-à-dire des sensibilités en fonction de la direction différentes. Ces directivités sont regroupées dans plusieurs familles, bien que la directivité de chaque micro soit unique. On connaît déjà les omnidirectionnels et les bidirectionnels, nous allons voir les autres familles.
Cardioïde
Sur ce type de directivité les bruits sont légèrement atténuées sur les côtés et fortement atténuées à l’arrière du micro. Ce type de directivité convient bien pour enregistrer une personne et son environnement proches, comme lors d’une interview de plusieurs personnes en simultanées.

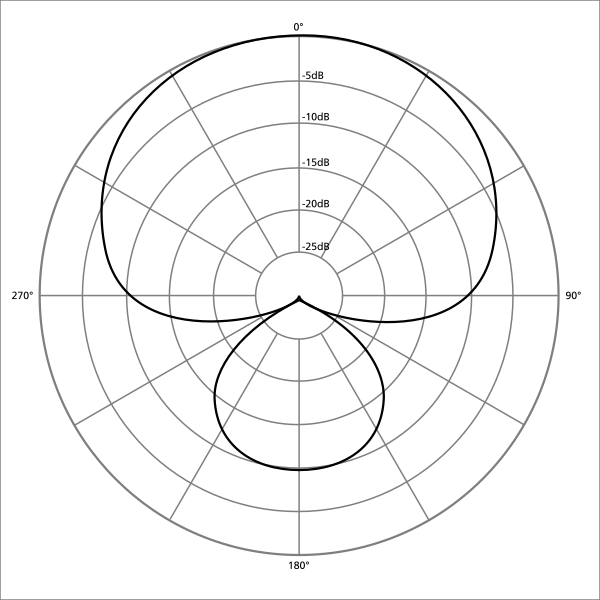
Super-cardioïde
Avec les micros super-cardioïdes les bruits sont un peu plus atténués sur les côtés et vraiment fortement atténuées à l’arrière. On note tout de même la présence d’un petit lobe arrière, zone dans laquelle le micro est légèrement sensible.
Hypercardioïde
Cette fois-ci le champ avant est encore plus étroit, on ne capte que ce qui se trouve vraiment devant le micro. On note encore la présence d’un lobe arrière, celui-ci est plus ou moins prononcé en fonction des micros. Ce type de micro convient pour isoler un son en particulier dans un environnement bruyant. Attention toutefois à la position du micro qui doit rester pointé vers la source du son.

De la difficulté de construire un bon micro
Vu comme ça, cela parait facile de construire un bon micro, mais bien d’autres paramètres sont à prendre en compte. Regardons par exemple la taille de la membrane, plus celle-ci est élevée plus le micro est sensible. C’est-à-dire qu’il développe une puissance électrique plus élevée (un signal plus fort) pour une pression acoustique égale. On aurait donc envie d’utiliser des grandes membranes dans tous les micros, mais cela implique un micro de taille imposante, incompatible avec certains usages (micro-cravate par exemple).
Le dilemme ne s’arrête pas là, quand la membrane est grande sa taille devient significative par rapport à la longueur d’onde du son.
La longueur d’onde en acoustique est reliée à la fréquence par la relation $ \lambda = c / f $. Avec $ c $ la célérité de l’onde (sa vitesse) et $ f $ la fréquence sonore.
La membrane, était jusque-là ignorée du point de vue physique, l’onde passait simplement à travers comme si de rien n’était. Comme la taille de la membrane ne peut plus être ignorée, elle commence à agir comme un obstacle vis-à-vis de l’onde sonore, c’est-à-dire que notre onde ne passe plus simplement à travers. Des phénomènes de diffractions et de réflexions commencent à apparaitre ce qui modifie la réponse du micro aux différentes fréquences du spectre.
La réponse fréquentielle
Depuis le début de ce tuto nous avons assez peu parlé de fréquences, hors toutes les caractéristiques d’un micro dépendent de la fréquence étudiée. Par exemple la directivité est fonction de la fréquence, on l’étudie en général pour une fréquence donnée, par exemple 1000 Hz. Intéressons-nous à la réponse fréquentielle du micro qui correspond à l’évolution de sa sensibilité en fonction de la fréquence.
Pour trouver la sensibilité d’un micro on joue un son pur à une certaine fréquence et à une certaine puissance. On fait alors varier la fréquence dans l’ensemble de la bande de fréquence du spectre audible (20 Hz à 20 kHz). On obtient alors ce genre courbe.
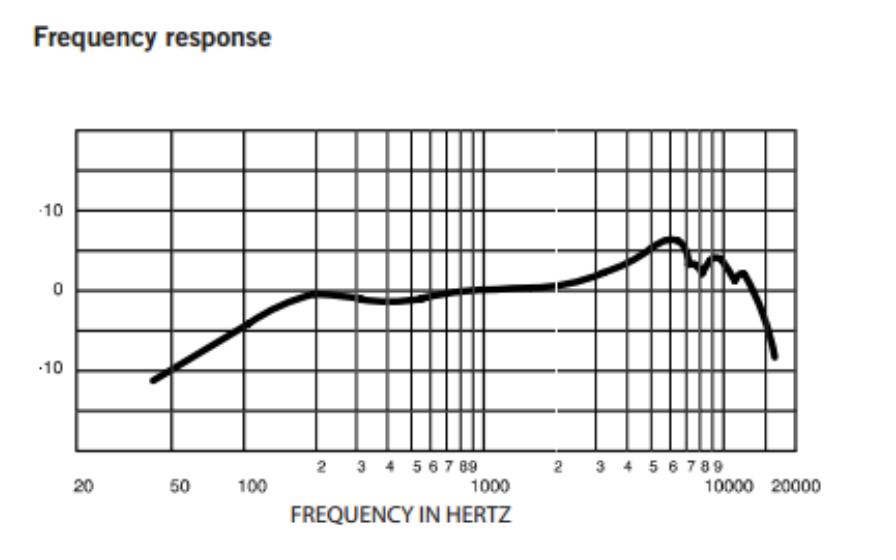
Sur l’abscisse ce sont les fréquences qui sont représentées et sur l’ordonné le niveau sonore relatif capté par le micro. On s’intéresse en général à la bande passante à -3 dB, c’est-à-dire à toutes les fréquences dont la captation à donnée un résultat entre 0 dB et -3 dB.
Une variation de -3dB dans le niveau sonore correspond en fait à une division par deux de la puissance sonore, un écart important ! Le décibel est une échelle logarithmique.
Sur ce micro on peut dire que la bande passante se trouve entre 100 Hz et 13 kHz, ce micro conviendra très bien pour la voix, mais ne pourra pas capter les sons très graves ou très aigus.
Maintenant vous avez un aperçu de la difficulté de construire un micro de qualité. Chaque paramètre (taille, matériaux, forme, etc.) joue sur le résultat final !
Le signal et son transport
On obtient maintenant un signal électrique aux bornes de notre micro, mais qu’est-ce que l’on en fait ? Voyons ça tout de suite.
Signal
À la sortie de notre micro on récupère un signal électrique, dont l’amplitude s’exprime en volts. Enfin dans notre cas plutôt en millivolts, car ce n’est pas en faisant bouger une membrane de quelques mm2 que vous allez produit beaucoup d’électricité. Typiquement le signal en sortie d’un micro est de l’ordre de 0,1 mV à 10 mV. Nous allons vouloir transporter ce signal afin de le diffuser ou de l’enregistrer. Pour cela nous avons le choix entre deux câbles, le jack et le XLR.
Les câbles
Le câble jack mono
Le premier est bien connu de tout le monde, très populaire ce type de câble est bon marché. Oui, mais ce n’est pas sans inconvénients : ce type de câble est très sensible aux parasites. Pour transporter le signal, cette connectique se contente de deux câbles électriques : un point chaud et une masse. En regardant la différence de potentiel entre ces deux câbles on obtient le signal.
Le problème c’est que notre monde est rempli de parasites électriques qui viennent s’ajouter à notre beau signal. Résultat notre rapport signal sur bruit chute et on obtient un son de pauvre qualité. Ce type de connectique convient donc pour de petites distances, mais peut vite être parasité. Une solution ? Le XLR.
Le câble XLR
Le câble XLR est un câble composé de trois broches visant à transporter un signal mono. Pourquoi est-on est passé de deux câbles à trois, pour transporter la même information ? Pour améliorer la qualité de la transmission.
En effet le câble XLR transporte à la fois le signal et une version inversée de ce signal. Comme nous allons le voir cette méthode permet de supprimer bon nombre des interférences. On appelle cette méthode la liaison symétrique. Quel que soit le signal que les lignes transportent, elles vont subir les mêmes parasites qui vont venir modifier la tension aux bornes des câbles. À l’entrée du câble nous envoyons donc notre signal $S(t)$ et une version inversée $-S(t)$. Sur la ligne et les parasites ($P(t)$) viennent s’ajouter au signal, on obtient donc d’une part $S(t) + P(t)$ et d’autre part $-S(t) + P(t)$. Dans l’équipement qui reçoit le signal (table de mixage, enceinte, etc.) il y a un petit composant électronique appelé AOP : amplificateur opérationnel de puissance et qui nous permet de réaliser une soustraction entre nos deux tensions.

On obtiens :
Magie ! Les parasites ont été annulées et on récupère deux fois notre signal. Le signal peut continuer à vivre sa vie, libéré de tous ces parasites. 
Avant de conclure, je vous propose un petit parallèle : savez-vous comment fonctionne une enceinte ?
Exactement à l’inverse d’un micro, pardi !
De la similarité entre un haut-parleur et un micro.
Le micro capte un son grâce au déplacement d’une bobine par rapport à un aimant et produit un courant électrique appelé signal sonore. Non ? Un haut-parleur est alimenté par un signal sonore qui est reproduit sous forme d’onde acoustique grâce au déplacement d’une bobine autour d’un aimant. Les deux systèmes fonctionnent exactement de la même manière. Ainsi si vous avez un haut parleur et que vous branchez un multimètre (ou mieux un oscilloscope) à ses bornes et que vous tapotez la membrane vous obtiendrez un signal. On peut réaliser un micro à partir d’un haut-parleur.

Poussons l’analogie plus loin, une enceinte possède aussi une directivité qui dépend de sa construction et bien sûr on s’intéresse de près à sa bande passante à -3dB pour savoir quelles fréquences elle peut reproduire. Si le sujet vous intéresse vous pouvez regarder de plus près les interphones qui ne fonctionnent souvent qu’avec un seul composant qui fait office de micro et d’enceinte à tour de rôle. Simplicité !
En savoir plus
Ce tuto fait partie d’un CdS sur le son, je vous invite à consulter les autres contenus. Si le sujet des micros vous a intéressé je recommande les liens suivants :
- Comment fonctionne un micro ? - AudioTechnica . Les sites des constructeurs proposent généralement des introductions intéressantes.
- Les micros (PDF) - Académie de bordeaux.
- Apprendre à réaliser un interphone.