Je ne sais pas si certains d’entre-vous ont déjà eu un cours sur les régulateurs P, PI, PID, … mais je tente quand même!
J’ai pas mal de difficultés avec les diagrammes en "boucle".
Voici un exercice que je suis pas certain de comprendre.
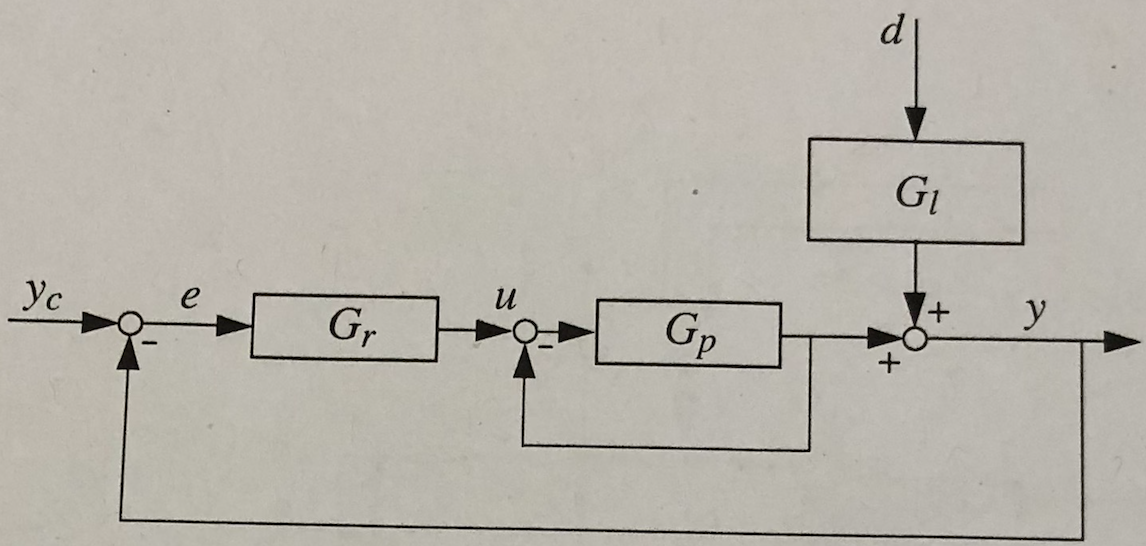
On considère le système de contrôle suivant:
Système de contrôle
On me donne les fonctions de transfert ${G_p}(s) = \frac{1}{{{s^2} + s - 1}}$ et ${G_l}(s) = \frac{1}{{s(s + 2)}}$.
On me demande de "design" le régulateur le plus simple (P, PI, PD, PID, …) qui élimine l’erreur permanente entre la consigne $y_c(t)$ et la sortie $y(t)$.
Je pensais d’abord simplifier le problème en définissant la fonction de transfert de la boucle secondaire (celle qui est à l’intérieur de la grande): $H(s) = \frac{{{G_p}(s)}}{{1 + {G_p}(s)}} = \frac{1}{{s(s + 1)}}$.
Après je vois pas trop quoi faire. Est-ce qu’il me suffit d’exprimer ${Y_c}(s) - Y(s)$ et de voir son comportement lorsque $s \to 0$ ?
La manière dont tu énonces le problème n’est pas extrêmement claire, puisque tu as deux entrées et une sortie, donc deux fonctions de transfert possibles. Il faudrait clarifier ça. Pour la suite, je suppose que d=0 et on considère seulement Y/Yc.
Je ne connais pas ton niveau de connaissance sur ce sujet, et il y a plusieurs solutions possibles.
Une solution consiste à compter le nombre d’intégrateur dans la boucle ouverte. Cela implique notamment de calculer la fonction de transfert comme tu l’as fait, de compter le nombre d’intégrateurs, et de voir s’il en manque par rapport à l’entrée prévue (un échelon ici ?).
Sinon, tu peux calculer la fonction de transfert en boucle fermée, prouver qu’elle est stable, puis calculer avec le théorème de la valeur finale l’erreur pour différents designs de contrôleurs. Tu peux alors voir comment cela s’annule.
Merci pour ta réponse. Il me semble qu’il n’y a une seule entrée $y_c$ et une seule sortie $y$, non?
C’est un cours de base dans les procédés, une "simple" introduction.
Dans la solution que j’ai, ils ont commencé à calculer la fonction de transfert dans la boucle secondaire (on note $H(s)$) et puis ils calculent $\frac{{E(s)}}{{{Y_c}(s)}} = \frac{1}{{1 + H(s){G_r}(s)}}$ et j’ai du mal à voir pourquoi c’est ça (je comprends bien que $E$ c’est l’erreur ($Y_c$$-$$Y$) et on étudie le rapport car c’est l’erreur par rapport à l’entrée).
Puis ils posent $G_r = K$ car ils disent qu’un simple régulateur P suffit. Encore une fois, je vois pas comment / pourquoi on peut affirmer ça…
Merci pour ta réponse. Il me semble qu’il n’y a une seule entrée $y_c$ et une seule sortie $y$, non?
Pour faire simple, il n’y en effet qu’une seule entrée, $y_c$ et une seule sortie $y$. Cependant, en toute rigueur, $d$ est aussi une entrée du système. C’est pourquoi on préférera parler de consigne pour $y_c$ et de perturbation pour $d$, plutôt que simplement d’entrée. Il s’en suit que tu as deux fonctions de transfert possibles : celle de suivi consigne Y/Yc (pour d = 0), et celle de "suivi" des perturbations Y/Yd (pour y = 0). En fin de compte, la sortie du système est une combinaison des deux.
Dans la solution que j’ai, ils ont commencé à calculer la fonction de transfert dans la boucle secondaire (on note $H(s)$) et puis ils calculent $\frac{{E(s)}}{{{Y_c}(s)}} = \frac{1}{{1 + H(s){G_r}(s)}}$ et j’ai du mal à voir pourquoi c’est ça (je comprends bien que $E$ c’est l’erreur ($Y_c$$-$$Y$) et on étudie le rapport car c’est l’erreur par rapport à l’entrée).
Calculer la fonction de transfert interne est un passage indispensable pour se ramener à la forme usuelle avec une seule boucle.
Faire le calcul de $E/Y_c$ n’est pas si compliqué que ça. Regarde.
Par définition de l’erreur :
$$ E = Y_c - Y $$
On peut exprimer $Y$ en fonction de $E$ grâce aux différents blocs du schéma :
$$ Y = H \times G_r \times E $$
On remplace dans la définition de l’erreur $Y$ par l’expression ci-dessus :
$$ E = Y_c - H \times G_r \times E $$
On peut factoriser par $E$ pour écrire :
$$ (1+H \times G_r) E = Y_c $$
En réorganisant, on trouve le résultat annoncé. Ce calcul est vraiment fondamental, on est amené à le refaire tout le temps. Notamment, c’est de là que vient la fameuse formule qui permet de trouver des fonctions de transfert en boucle fermée à partir de la fonction de transfert en boucle ouverte.
Puis ils posent $G_r = K$ car ils disent qu’un simple régulateur P suffit. Encore une fois, je vois pas comment / pourquoi on peut affirmer ça…
Une fois que tu as calculé la fonction de transfert $E/Y_c$, tu peux normalement montrer assez facilement que l’erreur en réponse à un échelon s’annule avec un correcteur proportionnel. Tu peux par exemple utiliser le théorème de la valeur finale après avoir montré qu’il existe effectivement une limite.
Merci beaucoup! C’est beaucoup plus clair. Si je comprends bien, on pourrait étudier l’erreur par rapport à la perturbation et donc étudier le rapport $\frac{{E(s)}}{{D(s)}}$
Est-ce donc correct de faire comme ceci ?
$$Y = {G_L} \times D + {H_p}\times {G_R} \times E$$
Cette fois-ci est-ce qu’on défini bien l’erreur par rapport à la perturbation comme $E = D - Y$ ou ça reste $E = {Y_c} - Y$ ? Parce qu’avec mon expression juste en haut il me semble compliqué d’extraire une expression pour $\frac{{E(s)}}{{D(s)}}$…
Sinon, je suppose qu’après on étudie la limite lorsque $s \to 0$ pour les deux et que dans les cas idéaux ça doit valoir $0$ (on vérifie ça avec différents régulateurs).
Merci beaucoup! C’est beaucoup plus clair. Si je comprends bien, on pourrait étudier l’erreur par rapport à la perturbation et donc étudier le rapport $\frac{{E(s)}}{{D(s)}}$
Oui, à la précision près qu’on étudie ce rapport pour $y_c = 0$.
Est-ce donc correct de faire comme ceci ?
$$Y = {G_L} \times D + {H_p}\times {G_R} \times E$$
C’est l’idée, mais c’est plus direct de partir de E = …
Cette fois-ci est-ce qu’on défini bien l’erreur par rapport à la perturbation comme $E = D - Y$ ou ça reste $E = {Y_c} - Y$ ? Parce qu’avec mon expression juste en haut il me semble compliqué d’extraire une expression pour $\frac{{E(s)}}{{D(s)}}$…
L’erreur reste $E = Y_c - Y$ ! C’est une définition du schéma.
Mais si tu veux voir les choses plus physiquement, regarde un peu cet exemple. Imagine que $y$ est le niveau d’un réservoir. On cherche à réguler le niveau du réservoir par rapport à sa consigne $y_c$.
En l’absence de perturbation ($d = 0$), on peut régler le système de remplissage pour que tout se passe bien, et on s’intéresse à $Y/Y_c$, c’est-à-dire la fonction de transfert qui décrit comment le réservoir se remplit, quand on le fait volontairement. L’erreur est naturellement $Y_c - Y$.
Maintenant, imagine qu’il y a des pertes dans le réservoir (fuite, évaporation, …). Cela correspond à la perturbation $d$. L’erreur reste toujours $Y_c - Y$, car l’objectif n’a pas changé : mettre le réservoir à un niveau donné. Par contre, le comportement du système face à l’erreur est décrit par $D/E$, ce qui revient à voir comment le système de contrôle arrive à rattraper le niveau du réservoir s’il change par accident.
Sinon, je suppose qu’après on étudie la limite lorsque $s \to 0$ pour les deux et que dans les cas idéaux ça doit valoir $0$ (on vérifie ça avec différents régulateurs).
Si tu étudies la limite quand $s$ tend vers zéro, prend garde à bien appliquer le théorème de la valeur finale, et ne pas faire l’erreur de l’appliquer à un système instable, et garder en tête que faire tendre $s$ vers zéro ne marche que dans le cas où l’entrée est un échelon. Il y a des petits calculs à faire avant si ton entrée est une rampe par exemple.
Connectez-vous pour pouvoir poster un message.
Connexion
Pas encore membre ?
Créez un compte en une minute pour profiter pleinement de toutes les fonctionnalités de Zeste de Savoir. Ici, tout est gratuit et sans publicité.
Créer un compte