Bonjour à tous,
Comme vous le savez surement je prépare l’agrégation de sciences physique (option chimie). Dans le cadre de cet exercice compliqué j’ai du me rendre compte de mes limites en physiques… Surtout en mécanique. Je n’ai jamais eu de cours de mécanique (juste des corrections d’exercices en M1 et là en M2).
Pendule simple
Une porte pousse une bille placée au bord sur une petite plateforme. La bille de masse m1 est suspendue à un fil de longueur ℓ=30cm fixé à un point O situé à 29cm plus haut que la plateforme de départ de la bille. On supposera que le fil reste tendu en toute circonstance et que la rayon de la bille est négligeable.
Alors voilà comment je vois le problème :
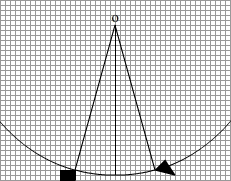
Un point O situé à mis chemin entre le taquet et la plateforme de départ. La bille part de la plateforme de hauteur z=−29cm le point du milieu est donc à z=−30cm et frappe le taquet en z=−29cm mais à l’autre bout.
Et la question est en gros : combien de temps Δt met la bille à frapper le taquet ? Je pense qu’il faut accéder aux équations horaires et ainsi arriver à la période ?
Principe fondamental de la dynamique
Par identification j’obtiens :
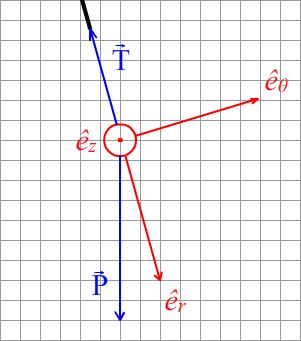
Là je bloque sur l’expression de l’accéleration, alors je repars de la définition tel que M point centré sur la bille :
Sous forme canonique :
Equation différentielle du second ordre si on se permet l’approximation des petits angles sinθ≈θ :
Alors on reconnait le temps caractéristique suivant : ωo2=ℓg que l’on sait relier à la période T=ωo2π=1.1s… Ok c’est chose fait, ça nous aidera surement plus loin ?
A partir de là j’ai commencer à chercher la distance à parcourir sachant que l’altitude varie de 29cm à 30cm et à nouveau à 29cm alors j’ai pris α l’angle que fait la bille a début de l’expérience, avec la verticale:
Donc 2α=254π ce qui vaut le trajet du départ vers le milieu de la course, puis du milieu de la course vers le taquet… Ensuite le périmêtre (distance parcouru) peut-être calculé :
Et là je coince… Si je veux la durée de ce trajet, il me faut la vitesse mais c’est pas évident. l’idée que j’me donne c’est de prendre la dérivé de l’angle θ(t)↦dtdθ(t) et donc de reprendre mon equation différentielle et la résoudre :
Or à l’instant initial t=0 j’ai une information :
La seconde information que j’ai, c’est la periodicité que je peux exprimer ainsi, si on néglige les forttements sur des petits angles, ce qui parrait cohérrent :
J’obtiens que A=0 et B=−α
Mais en fait malgré tout ça, j’me retrouve bloqué lorsque j’égalise :
J’obtiens δt et t j’ai du mal à voir comment j’peux m’en sortir. J’ai vraiment l’impression de ne pas être pertis du bon coté… Au risque de passer pour un aveugle, si quelqu’un pourrait me donner un indice ce serait cool. Ou alors j’me suis planté dans un calcul. Idem faite le moi savoir 




