Passons maintenant à la 3D ! Vous allez voir dans ce chapitre que la collisions des formes 3D simples ressemble étrangement à leur équivalent en 2D.
AABB 3D
Voici maintenant quelques algorithmes de collision en 3D. Pour commencer, voyons les collisions AABB mais en 3D.
Définition
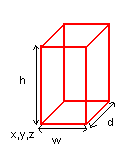
Une Bounding Box 3D, alignée avec les axes, est comme une bounding box 2D vue au dessus, mais avec une dimension supplémentaire.
Nous pourrons définir la structure suivante :
struct AABB3D
{
float x, y, z;
float w, h, d;
};
Nous avons les coordonnées du point le plus proche de l’origine du monde, et la largeur (width), la hauteur (height) et la profondeur (depth).
En 3D, il est d’usage de travailler avec des coordonnées réelles, donc des nombres flottants. Nous travaillons donc dans l’espace réel .
Applications
Ce type de collision est très utilisé dans les jeux 3D. Ici dans Descent FreeSpace pour détecter les collisions entre vos tirs et les vaisseaux ennemis :

Calcul de collision
Point dans AABB3D
Le calcul est très similaire à celui du premier chapitre. Il suffit de vérifier si le point (de coordonnées est entre 6 parois de la AABB3D.
bool Collision(float x, float y, float z, AABB3D box)
{
if (x >= box.x
&& x < box.x + box.w
&& y >= box.y
&& y < box.y + box.h
&& z >= box.z
&& z < box.z + box.d)
return true;
else
return false;
}
Collision de deux AABB3D
De même, le concept ici est vraiment très proche de celui de collision de deux AABB (2D). Il faudra vérifier, pour une box1, si la box2 n’est pas « trop à gauche », « trop à droite », « trop en haut », ou « trop en bas », comme pour les box 2D, mais également qu’elle ne soit pas non plus « trop devant » et « trop derrière ».
Il suffit d’enrichir le if de la fonction, et nous obtenons alors la fonction suivante :
bool Collision(AABB3D box1, AABB3D box2)
{
if((box2.x >= box1.x + box1.w) // trop à droite
|| (box2.x + box2.w <= box1.x) // trop à gauche
|| (box2.y >= box1.y + box1.h) // trop en bas
|| (box2.y + box2.h <= box1.y) // trop en haut
|| (box2.z >= box1.z + box1.d) // trop derrière
|| (box2.z + box2.d <= box1.z)) // trop devant
return false;
else
return true;
}
Sphères
Les bounding sphères sont une application en 3D des algorithmes sur les cercles que nous avons vu plus haut.
Définition
Une sphère est définie par son centre et son rayon.

En C, on peut définir cette structure :
struct Sphere
{
float x, y, z;
float rayon;
};
Applications
Un jeu de billard en 3D peut utiliser ce type de collisions. Également d’autres shoot’em up 3D (tel Descent FreeSpace vu ci-dessus) si on considère les vaisseaux inscrits dans des sphères au lieu de AABB3D, les 2 formes peuvent donner de bons résultats).

Calcul de collision
Les calculs sont très similaires à ceux vus dans le chapitre sur les cercles en 2D. Ils se basent sur le calcul de distance 3D. Ce calcul est une généralisation de Pythagore dans l’espace :
Avec la même astuce, considérant la distance au carré, nous arrivons aux deux fonctions suivantes :
Point dans une sphère
Soit le point , nous souhaitons savoir s’il est dans la sphère :
bool Collision(float x, float y, float z, Sphere S)
{
int d2 = (x - S.x) * (x - S.x) + (y - S.y) * (y - S.y) + (z - S.z) * (z - S.z);
if (d2 > S.rayon * S.rayon)
return false;
else
return true;
}
Collision de deux sphères
Collision de 2 sphères : voyons si la distance entre les deux centres est supérieure ou inférieure à la somme des rayons.
bool Collision(Sphere S1, Sphere S2)
{
int d2 = (S1.x - S2.x) * (S1.x - S2.x) + (S1.y - S2.y) * (S1.y - S2.y) + (S1.z - S2.z) * (S1.z - S2.z);
if (d2 > (S1.rayon + S2.rayon) * (S1.rayon + S2.rayon))
return false;
else
return true;
}
De même qu’en 2D, ces collisions sont rapides et efficaces.