Cet article a pour objectif de présenter l’histoire, les particularités et le fonctionnement général de la ligne D du réseau métropolitain de l’agglomération lyonnaise. En effet, ce fut le premier métro à grand gabarit de France à être entièrement automatisé, et ce dès sa conception.
Dans un premier temps, je vous présenterai rapidement son histoire et son infrastructure, puis je vous expliquerai plus en détail le fonctionnement de son pilote automatique et ce qui en fait un chef-d’œuvre dans son domaine.
Présentation de la ligne
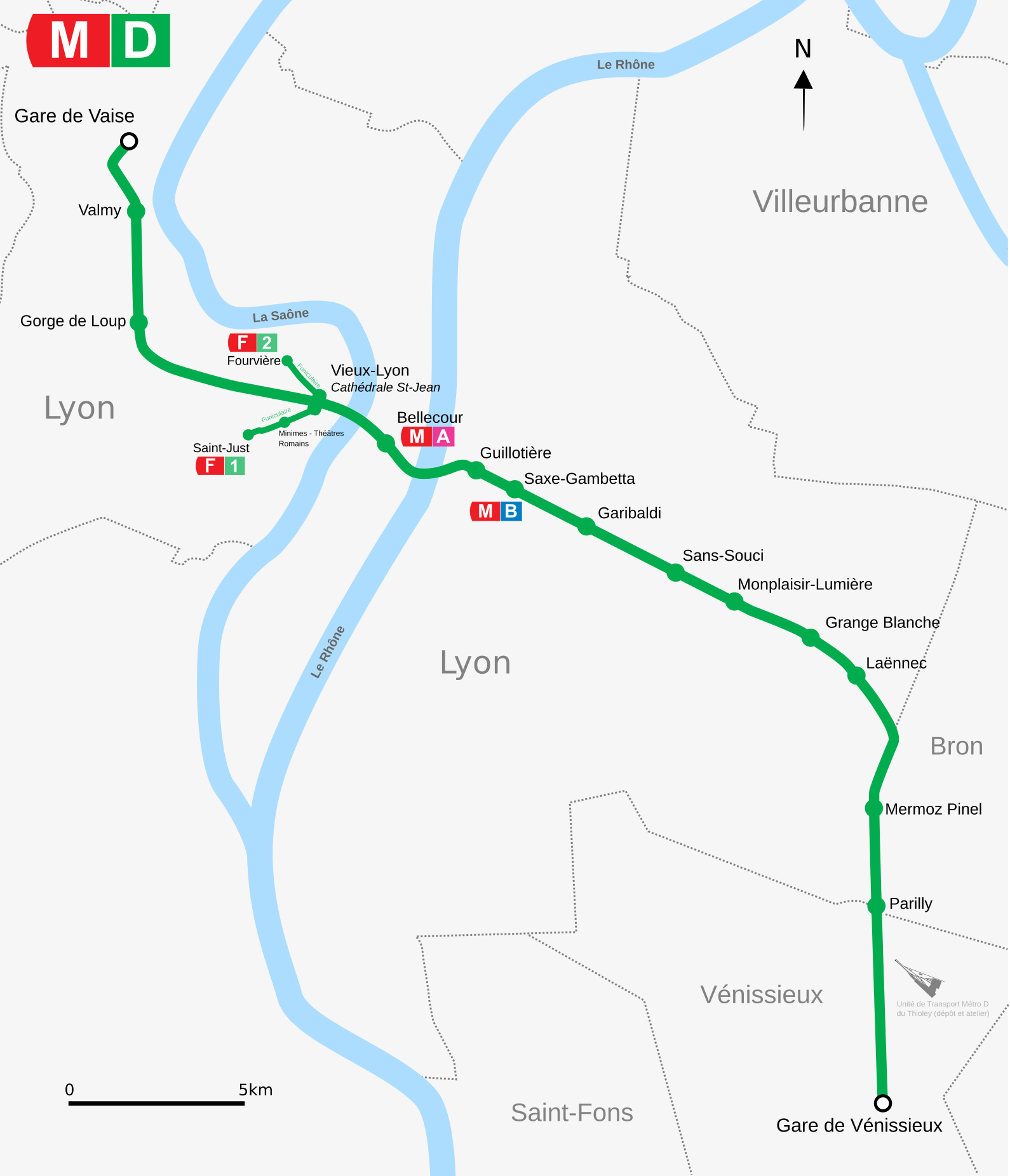
La ligne D du métro de Lyon est la plus récente et la plus fréquentée du réseau. Elle transporte quotidiennement 296 595 passagers1 à travers 15 stations réparties sur 12,6km entre la gare de Vaise et la gare de Vénissieux.

Historique de la ligne
Dans les années 1960, la SEMALY commence à envisager la création d’une ligne de transport publique traversant l’agglomération lyonnaise du sud-est au nord-ouest. Les métros A et B étant déjà en phase de conception, le projet a été retardé au profit de l’extension de ces derniers. Cependant, la densification urbaine au sud-est de la ville pousse les TCRL2 à étudier les options les plus économiques possibles pour améliorer la desserte de ce secteur. Des solutions comme une ligne de tramway ou un métro léger partiellement souterrain ont été envisagées puis abandonnées sous l’impulsion des élus de l’époque qui penchaient majoritairement pour un métro lourd.
En 1970, la SEMALY lance finalement les premières études afin de concevoir un métro lourd entre Saint-Jean Vieux-Lyon et Grange-Blanche. La ligne sera prolongée jusqu’à ses terminus actuels (gare de Vaise et gare de Vénissieux) au fur et à mesure des travaux.
- Source: http://www.ferro-lyon.net/↩
- C’est l’ancien nom de Keolis Lyon, le délégataire de service public actuel.↩
L'infrastructure
Construction
La ligne a été construite selon deux procédés différents en fonctions des contraintes de terrain et de surface. Entre Guillotière et gare de Vénissieux la ligne a été construite en tranchées couvertes. Entre gare de Vaise et Guillotère, la voie a été réalisée par percement de deux tunnels (un pour chaque sens de circulation) afin de passer sous le Rhône, Fourvière et la Saône.
Plusieurs problèmes ont été rencontrés lors du percement des tunnels. Dès les premiers mètres le tunnelier, prévu pour un sol assez meuble, est fortement ralentit par les pieux en bois de l’ancien pont Guillotère. Le chantier n’a pu reprendre qu’après congélation du sol et les ouvriers ont dû couper les pieux à la tronçonneuse au fur et à mesure de l’avancée du tunnelier. Le passage sous le Rhône n’a pas été non plus de tous repos: les blocs en pierre du pont avaient été utilisés pour combler des trous dans le lit du fleuve. Le tunnelier se heurte donc à des blocs très denses qu’il ne peut percer et en contact direct avec l’eau. Il a fallu remblayer le lit du fleuve avec des sacs de sable et envoyer des scaphandriers pour découper les blocs en amont de la roue de coupe.
Les voitures
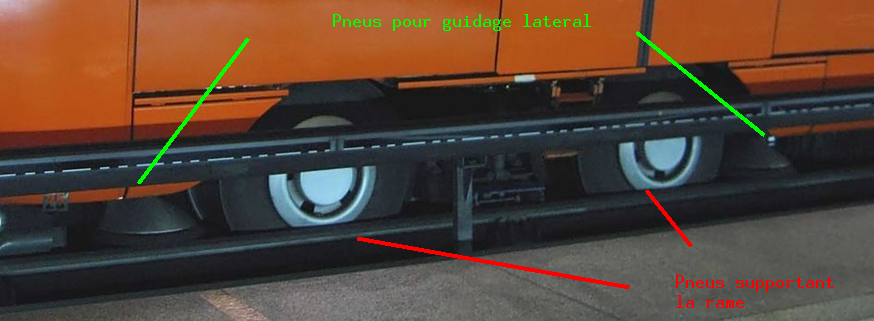
La SEMALY a, dans un premier temps, décidé de commander des motrices du même type que celles équipant déjà les lignes A et B. Cependant, des modifications ont été apportées suite à la demande des élus de l’époque qui voulaient mettre en place un pilotage automatique intégral de la ligne1. 36 rames de types MPL85 sont donc commandées à Alsthom2. Comme leur nom l’indique, ce sont des rames à roulement sur pneu avec guidage par roulement sur fer. Concrètement, chaque essieu est composé de deux pneus doublés de deux roues en acier à mentonnet permettant de guider la rame au niveau des aiguillages et de supporter son poids en cas de crevaison. Des pneus sont également présents sur les côtés de chaque voiture pour assurer le guidage latéral.
Chaque rame est composée de deux caisses sans intercirculation. La configuration intérieure a été revue plusieurs fois pour passer la capacité maximale de 264 passagers à la livraison à 325 en 2009. Pour ce faire, les places assises ont progressivement été supprimées au profit d’appuis ischiatiques3. Du fait du pilote automatique, il n’y a pas de cabine de conduite, donc de larges baies vitrées à chaque extrémité du train permettent aux passagers de voir ce qu’il se passe devant et derrière le train.
Les rames sont recouvertes d’une livrée orange depuis leur mise en circulation. Cependant, depuis 2013, chaque rame part tour à tour dans une usine dans l’ouest de la France afin de subir une révision intégrale et d’être repeinte en blanc et rouge TCL.


Unité de transport métro D du Thioley

La maintenance, qu’elle soit légère ou lourde, est entièrement réalisée sur le site du Thioley à Vénissieux. En effet, les particularités du pilote automatique empêchent toute mise en commun des ateliers avec les lignes A et B. Le dépôt est divisé en deux parties:
- La première est entièrement gérée par le pilote automatique. Elle est composée des garages, du tunnel de nettoyage des rames et d’une zone pour les essais dynamiques en sortie de garage. À chaque passage dans la zone, la rame enclenche un freinage d’urgence et vérifie le temps qu’elle met avant de s’arrêter. Si ce temps est au-dessus de la norme, la rame ne partira pas en service.
- La seconde zone contient les ateliers dans lesquels les trains sont pilotés en manuel et une voie d’essai du pilote automatique.

- Les autres lignes du réseau sont en pilotage semi-automatique. Le conducteur y a essentiellement un rôle de supervision.↩
- Non ce n’est pas une faute d’orthographe, jusqu’en 1989, Alstom s’écrivait avec un "h".↩
- Ce sont des appuis lombaires légèrement rembourrés sur lesquels on s’appuie en étant debout.↩
MAGGALY
Derrière ce doux nom se cache la grande innovation du métro D. MAGGALY pour Métro À Grand Gabarit de l’Agglomération Lyonnaise est le nom du pilote automatique numérique installé. En effet, alors que le métro D devait être équipé des mêmes rames que les lignes A et B, les élus de la SEMALY qui ont été impressionnés par le métro VAL1 de Lille, en pilotage automatique analogique depuis son inauguration en 1983 et n’ayant pas subi de dysfonctionnements majeurs, ont souhaité étudier la faisabilité d’automatiser intégralement la ligne D. L’automatisation intégrale a finalement été retenue par les élus, à la seule condition qu’il n’y ait pas de portes palières2. C’est ainsi que sont commandées 36 voitures de deux caisses (et non 3 comme initialement prévu, afin de limiter le surcoût dû au pilotage automatique) à Alsthom et que la conception du pilote automatique est confiée à Matra transport3.
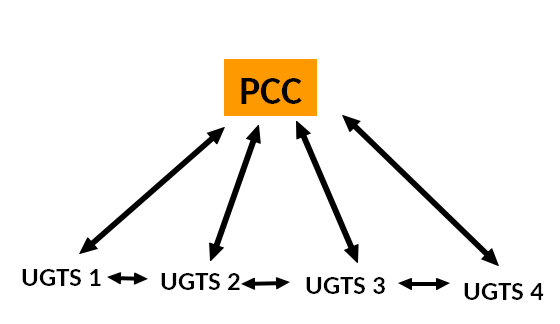
Le pilote automatique peut se découper en deux parties: les unités de gestion de tronçons et de sections (UGTS) réparties sur toute la ligne, et les unités de gestion embarquées (UGE) qui se trouvent à bord de chaque train. Les deux communiquent par le biais d’un tapis à induction type Métro de Paris posé sur la voie et d’une antenne sous le train. Les UGTS sont à leur tour reliées au poste de commandes centralisées (PCC) où se trouvent les trois superviseurs de la ligne et le chef de quart, commun aux 4 lignes de métro de Lyon4. Il y a 12 UGTS redondées gérant chacun une section couvrant au maximum deux stations et tous les trains se trouvant dans la section. Chaque UGTS est reliée aux deux autres UGTS adjacentes afin d’assurer la continuité des communications avec les trains lors de leurs changements de section.
Les UGTS servent à coordonner chaque train et à garantir un fonctionnement cohérent et sûr de l’ensemble. Quand tout va bien chaque UGTS envoie une autorisation de conduite automatique intégrale. Cependant en cas d’anomalie, cette autorisation n’est plus envoyée et les trains s’arrêtent donc tous en freinage d’urgence. Ce fonctionnement est d’autant plus sécuritaire que si le signal est bien envoyé mais qu’une rame, en raison d’une défaillance, ne peut pas la recevoir alors elle freinera en urgence, ce qui empêchera que la défaillance en question provoque un accident.
De manière générale, l’ensemble des capteurs et sécurités fonctionnent en logique positive, c’est-à-dire que tant que l’information envoyée est à l’état haut (n’oubliez pas que le système est numérique, donc codé en tout ou rien, 1 ou 0) tout va bien et l’état bas indique une anomalie ou une situation potentiellement dangereuse. Ainsi, si un élément tombe en panne et n’envoie plus son signal, le système se comportera toujours en sécurité.
Nous allons maintenant voir un peu plus en détail les points forts qui ont rendu MAGGALY si novatrice à son apparition.
La Sécurité Quai - Voie
Fonctionnement
Comme dit précédemment, les élus avaient posé pour condition que le système devait être sécuritaire tout en n’utilisant pas de portes palières qu’ils jugeaient peu pratique et contraignantes. De plus, ajouter des portes palières aurait rendu le système plus "lourd" et plus lent. En effet, cela impose un certain nombre de vérifications à l’arrivée et au départ d’une rame pour le pilote automatique. Par exemple, il faut vérifier si les portes de la rame sont bien alignées sur les portes palières avant de les ouvrir, vérifier qu’elles sont bien fermées et que rien n’est coincé dedans avant d’autoriser la rame à repartir… Tout cela demande des calculs et dans les années 80 ajouter toutes ces contraintes risquait de faire perdre des précieuses secondes à chaque arrêt en station.
Dans cette optique, le système sécurité quai - voie (abrégé SQV) a été développé. Plutôt que d’utiliser un système limitant physiquement l’accès à la voie, il a été décidé d’utiliser une barrière de faisceaux infrarouge. De part et d’autre de la voie et sur toute la longueur du quai, des rayons infrarouges sont émis tous les 15 cm. En cas de coupure de deux faisceaux ou plus, ce qui signifie qu’une personne ou un objet de taille supérieure à 15 cm est tombé sur le voies, le courant de l’ensemble de la section électrique5 est coupé, ce qui entraîne le freinage d’urgence de toutes les rames se trouvant dans cette section. Des fosses entre les voies complètent le dispositif pour permettre à une personne tombée du quai de pouvoir passer sous le train si celui-ci n’a pas le temps de freiner avant. Le SQV est géré par l'UGTS couvrant la station.
Et mais attends? Si j’ai bien tout suivi avec ton histoire, comment ce fait-il que le train ne déclenche pas lui-même le dispositif en rentrant en station?
Eh bien c’est une excellente question! En effet, une rame rentrant en station coupe forcément le premier et le deuxième rayon infrarouge en même temps, ce qui devrait couper le courant comme expliqué précédemment. Une solution possible est de désactiver le dispositif SQV à l’approche d’une rame; cependant, quelqu’un tombant du quai à ce moment là pourrait être électrocuté par l’énergie du freinage électrique envoyée par la rame6 en approche ou se faire écraser. Il a donc fallu trouver une solution plus subtile.
Pour pallier ce problème, à chaque extrémité du quai, les barrières infrarouges ont été prolongées de huit faisceaux dans le tunnel; les quatre premiers (dans le sens tunnel => station) servent à détecter l’approche d’un train. Quand une rame entre en station, elle coupe un premier faisceau, ce qui indique au système SQV sa présence. Un masque de la longueur de la rame va ainsi être créé et suivre virtuellement l’avancée de la rame, en en inhibant la détection des faisceaux au fur et à mesure de sa progression. Avec ce système, la rame ne déclenche pas la sécurité mais celle-ci reste active à l’avant et à l’arrière de la rame!
Voici un petit résumé en image:
Si vous avez bien tout suivit jusqu’ici, vous avez dû vous rendre compte que j’ai parlé de huit faisceaux infrarouges avant chaque station mais que seulement les quatre premiers servaient à l’initialisation du masque. Les quatre autres servent simplement à la détection d’intrusions dans le tunnel. En effet, dans le cas d’une descente volontaire sur la voie, la personne pourrait décider de s’aventurer dans les tunnels et il faut donc que les régulateurs puissent le savoir pour pouvoir prendre les bonnes mesures de sécurité. Le courant étant coupé uniquement sur la section concernée, la personne cheminant dans les tunnels pourrait se retrouver sur une section encore alimentée. Il faut donc impérativement pouvoir retracer son cheminement et différencier une simple descente sur la voie d’une petite ballade en tunnel. Ainsi, si plus d’un de ces quatre faisceaux sont coupés, c’est qu’il y a un intrus dans le tunnel.
Retour d’expérience et limites du système SQV
Durant les premières années de fonctionnement de la ligne, le système SQV a été source de nombreux désagréments en provocant des arrêts d’exploitation non nécessaires, engendrant de nombreux retards. En effet, un journal qui tombe sur la voie, alors qu’il est inoffensif pour le fonctionnement du métro, peu couper simultanément deux faisceaux infrarouge et provoquer un arrêt d’urgence sur la section. Il en va de même pour un sac plastique entraîné par les courant d’airs dans le sillage d’une rame. De plus, même en cas d’arrêt justifié du système, il faut d’abord s’assurer que la cause de cet arrêt ne soit plus présente avant de relancer l’exploitation; et pour cela, il fallait envoyer un agent de ligne sur site afin de vérifier. Et c’est encore pire si une intrusion est détectée dans le tunnel. Dans un métro avec conducteur, la procédure veut que les tunnels habituellement éteint soient provisoirement éclairés et que les rames roulent à vitesse réduite afin que les conducteurs puissent vérifier que les tunnels sont bien vide de toute présence étrangère et réagir à temps si ce n’est pas le cas. Dans un métro automatique, cela n’est pas possible. Il fallait donc q’un agent de ligne parcourt à pied le tunnel concerné (avec trafic arrêté), ce qui engendre un long arrêt d’exploitation alors que l’intrus peut être remonté sur le quai de lui-même bien avant.
Afin de minimiser les temps d’arrêts, des caméras couplées à des systèmes d’enregistrement ont donc été installées aux embouchures des tunnels dans chaque station. Ainsi, lorsque le SQV provoque un arrêt, le régulateur peut immédiatement visionner l’enregistrement vidéo de l’incident et vérifier en direct si l’arrêt est justifié. De cette manière en cas d’arrêt non justifié, il suffit de 40 secondes environ au régulateur pour relancer l’exploitation.
Le système est très efficace et a déjà pu sauver des vies. Cependant, tout comme un conducteur humain, il ne peut pas faire beaucoup plus lorsque une personne se jette volontairement juste devant une rame. Ainsi, en avril 2016, un homme s’est jeté devant le métro alors que celui-ci redémarrait7. La rame n’a donc pas pu freiner à temps pour l’éviter.
Le pilote automatique embarqué
Le pilote automatique embarqué, correspondant à l'UGE précédemment évoquée, est décomposée en deux sous-unités: le pilote automatique fonctionnel et le pilote automatique sécuritaire.
- Le pilote automatique fonctionnel sert au contrôle de la rame. Il gère la conduite du train, le confort passager (ventilation, informations sonores…), l’ouverture et la fermeture des portes du bon côté8, la communication avec l'UGTS…
- Le pilote automatique sécuritaire a un rôle de contrôle. Il sert à vérifier le bon fonctionnement du pilote automatique fonctionnel et que celui-ci reste bien en zone de sécurité. Dès que le train sort de celle-ci, c’est lui qui déclenche l’arrêt d’urgence de la rame. Chaque rame est équipée de deux mono-processeurs (un par voiture) calculant simultanément les instructions. En cas de désaccord dans le calcul, une alerte est levée au niveau du PCC et un arrêt d’urgence est déclenché.
Le Canton mobile déformable
Principe
Les métros étant d’abord et avant tout des trains urbains, ils ont hérités d’une partie des réglementations et des signalisations des trains classiques. Or, les transports ferroviaires doivent répondre à une problématique majeure qui est la suivante: comment éviter qu’un train ne rattrape celui qui le précède et le percute? Les trains circulant à vitesse élevée, la détection visuelle par le conducteur serait trop tardive pour freiner à temps. La réponse utilisée est de découper la voie en cantons de taille définie et de n’autoriser qu’un seul train à la fois à se trouver dans un canton. La plupart des métros du monde ont hérité de ce mode de fonctionnement. Cependant, ce système est efficace pour une voie relativement longue, mais il devient très vite limitant pour un métro dont la distance entre chaque station est plutôt faible. En effet, cela limite le nombre de trains présents simultanément sur le réseau au nombre de cantons. Cela laisse donc très peu de marge de manœuvre pour faire face à une augmentation de fréquentation. Pour la future ligne la plus fréquentée du réseau lyonnais, il a donc fallu trouver une solution plus performante.
La solution retenue a été d’utiliser le principe des Cantons Mobiles Déformables, ou CMD. À la place de cantons fixes, chaque rame pousse son propre canton devant elle. Plus précisément, la rame tient compte de la vitesse maximum autorisée sur la zone où elle se trouve, de sa vitesse réelle, de sa distance d’arrêt si elle devait freiner en urgence avec cette vitesse et de la position de la rame qui la précède pour calculer sa vitesse nominale de consigne. On se situe ainsi dans une situation d’asservissement dynamique.
Fonctionnement
Pour comprendre le fonctionnement du CMD, il faut d’abord comprendre comment chaque rame se localise précisément. Pour cela, nous allons retracer le fonctionnement pour une rame. Lors de son allumage, une rame se situe dans une zone de garage. Elle est dans un état délocalisé et transmet cet état à l'UGE de la section. Normalement, la délocalisation d’un train entraîne l’arrêt de l’émission de l’autorisation de conduite automatique intégrale, provocant l’arrêt immédiat de tous les trains gérés par cette UGTS. Cependant, certaines zones comme les garages, autorisent des éléments à être délocalisés quelques secondes et à faible vitesse (3 km/h). L'UGTS transmet une position approximative au train qui passe en état dit téléchargé. Le train démarre et avance jusqu’à ce que son antenne détecte la première balise de positionnement. En effet, le tapis à induction disposé en fond de voie sert à la communication des rames mais est aussi équipés de balises uniques, qui lorsqu’elles sont lues par un train lui permettent de connaître sa position exacte. Dès la lecture de cette balise, le train passe donc de l’état téléchargé à localisé et transmet donc sa position à l'UGTS qui lui confit ensuite un itinéraire à suivre.
Il est équipé d’une roue phonique9 lui permettant ensuite de continuer à connaître sa position exacte à tout instant. Toutefois, la roue phonique ne reste pas très précise puisque étant installée sur une roue, sa mesure et progressivement faussée par la déformation du pneu, par son glissement sur la bande de roulement et par la courbure des voies. Il faut donc que le train puisse revérifier sa position régulièrement pour compenser cette erreur de position qui, s’accentuant en fonction de la distance parcourue, pourrait être fatale. Des balises sont donc régulièrement disposées tout au long des voies, pour permettre au train de garder une erreur de positionnement assez faible pour ne pas être dangereuse. De plus, le système est tolérant à la non-lecture d’une balise, c’est-à-dire que si une balise n’est pas lue, l’erreur de position reste encore acceptable jusqu’à la lecture de la prochaine balise.
Le train connaissant ainsi en permanence sa position, il la transmet à l'UGTS via le tapis à induction. Il récupère par ce même moyen la position du train le précédent. En connaissant cette information, la vitesse actuelle, la vitesse limite de la section et les caractéristiques cinématiques d’une rame et un coefficient de sécurité fixé à la conception, il est possible de calculer la vitesse maximum que peut atteindre un train à tout instant pour aller au plus vite tout en étant toujours capable de s’arrêter avant de percuter la rame d’avant en cas de freinage inopiné de celle-ci.
Cet asservissement dynamique de la vitesse fonctionne de la même manière pour les points d’arrêts fixes tels que les stations ou les aiguillages.
Il faut garder en mémoire que les rames sont équipées de monoprocesseurs datant du début des années 80. La fonction utilisée pour calculer le CMD étant plutôt complexe (c’est une fonction récursive), elle serait trop lente à être calculée par les mono-processeurs. Ainsi, l'UGE utilise une table de valeurs pré-calculées dans laquelle il lit la vitesse qu’il doit atteindre en fonction de la distance le séparant de la rame le précédent.
En cas d’erreur de position trop importante d’une rame ou d’une rame ne transmettant plus sa position, celle-ci passe en état délocalisé ce qui provoque l’arrêt de l’émission du signal d’autorisation de conduite automatique intégrale et déclenche l’arrêt d’urgence de toutes les rames de la section.
Retour d’expérience et limites de fonctionnement du CMD
Bien que beaucoup plus complexe à mettre en œuvre que les cantons fixe, le canton mobile déformable semble être une bonne solution pour augmenter la cadence de circulation des métro et pouvoir répondre à l’augmentation de fréquentation. Dans les faits, les bénéfices du CMD sont peu perceptibles. En effet, le système n’est volontairement pas utilisé à sa pleine puissance ce qui limite fortement son utilité.
La première raison vient du dispositif anti-entassement. Avec le CMD seul, si un train roule à faible allure sur une longue portion de voie (par exemple une rame défaillante parcourant le réseau à basse vitesse pour rentrer au dépôt), toutes les rames la suivant vont aller à vitesse maximum jusqu’à être contraintes de ralentir derrière celle-ci. On se retrouverait ainsi avec toutes les rames en circulation les unes après les autres sur une petite portion de voie avec des trains en stations très régulièrement sur cette partie du réseau, et tout le reste du circuit délaissé avec des temps d’attentes de plusieurs dizaines de minutes. Cette situation étant non souhaitable, un dispositif anti-entassement a été implémenté afin d’assurer une répartition équitable des trains sur tout le réseau et un meilleur respect des horaires de passages aux arrêts programmés. Avec ce dispositif, la distance entre deux trains et souvent plus importante que celle autorisée par le CMD.
Pour expliquer la seconde raison, je vais passer par un exemple qui peut sembler n’avoir aucun rapport au premier abord. On est lundi, 18h en pleine heure de pointe, un des usagers de la ligne a décidé de faire du tourisme et part à pied dans un tunnel. Le SQV de la station coupe le courant sur la section, arrêtant brutalement les trains roulant sur celle-ci. D’autres rames s’approchant de la zone hors tension, le PCC décide de les arrêter au fur et à mesure dans les stations amonts pour que les passagers puissent descendre. Cependant, il y a plus de trains que de stations donc certaines rames sont stoppées en tunnel. Une annonce est diffusée dans celle-ci afin de demander aux passagers de bien vouloir patienter car la rame repartira bientôt. En effet, l’agent de ligne est arrivé sur site et vient de retrouver l’intrus dans le tunnel et dès que tous les deux auront regagné la station, le trafic sera relancé. On en est a dix minutes d’interruption et d’ici cinq minutes tout devrait rentrer dans l’ordre. Sauf que dans une rame arrêtée en tunnel, un impatient décide malgré les messages, de déclencher l’ouverture de secours des portes et de partir dans le tunnel en direction de la station. Certaines personnes le suivent et d’autres, plus hésitantes partent quelques minutes après mais de l’autre côté du tunnel. Il faut donc vérifier que toutes ces personnes sont bien remontées sur les quais avant de tout relancer.
Cet exemple montre comment un arrêt d’exploitation qui aurait pu durer au plus vingt minutes peut durer plus de trois heures. Malheureusement, c’est souvent ce qui se passe quand une rame est immobilisée plus d’une dizaine de minutes en tunnel, même si elle aurait pu repartir cinq minutes plus tard. Pour pallier ce phénomène, il a été décidé de faire en sorte que chaque rame circulant sur la ligne puisse s’arrêter en station. Cette limitation du nombre de rames fait qu’en pratique le nombre maximum de rame pouvant circuler avec le CMD n’est pas atteinte.
Nous venons de voir que le CMD ne permet pas forcément d’avoir un trafic plus dense que si la ligne était exploitée en canton fixe, mais il peut être aussi source de davantage de perturbations que le canton fixe en cas de panne. En effet, tout étant basé sur la connaissance de la position de chaque train, si pour une raison quelconque un train ne donne plus sa position ou ne la connaît pas avec assez de précision, cela peut arrêter la circulation sur toute la ligne. De plus, une fois reprit en manuel via l’un des pupitres de secours de la rame, la rame va déclencher les sécurités de chaque UGTS en circulant en délocalisé, obligeant le PCC à acquitter les erreurs à chaque fois pour maintenir le fonctionnement de la ligne.
Toutefois, malgré tous ces inconvénients il y a un avantage non négligeable à utiliser le CMD que je vais aborder dans quelques paragraphes.
L’héritage d’ARAMIS
La pilote automatique MAGGALY a été développé par Matra Transport. Or, depuis le début des années 70, Matra travaillait également sur un projet novateur en partenariat avec la RATP, le projet ARAMIS10 (pour agencement en rames automatisées de modules indépendants en stations). Ce projet consistait en un ensemble de petits modules ferroviaires sur pneus en conduite automatique pouvant s’accoupler et se scinder automatiquement en fonction de la destination. Ce système n’a jamais été utilisé réellement commercialement mais des concepts de celui-ci ont été utilisés au sein de MAGGALY.
Ainsi, chaque rame est composée de deux caisses sans intercirculation toutes deux munies d’un attelage à leur extrémité. Cet attelage peut être utilisé pour faire circuler des rames en unités multiples. La longueur des quais de la ligne D a été prévue pour accueillir des unités multiples composées de deux rames simples, cependant, en théorie la longueur d’une unité multiple pourrait être infinie. Cela permet d’augmenter la capacité de la ligne en heure de pointe en doublant la capacité de chaque train.
Le point fort et révolutionnaire de ce système est qu’il peut être géré automatiquement par le pilote automatique. En heure de pointe, le PCC peut demander à certaines rames ou toutes de passer en unités multiples. Concrètement, lors de l’arrivée d’une unité simple en terminus, celle-ci passe en arrière gare et attend. Lors de l’arrivée d’une deuxième unité simple en terminus, celle-ci rejoint la première en arrière gare et s’accroche automatiquement à la première avant que l’unité multiple ainsi composée ne parte dans l’autre sens. Le passage d’une unité multiple a deux unités simples est tout aussi rapide: l’unité multiple passe en arrière gare, se scinde automatiquement puis les deux unités simples la composant repartent l’une après l’autre.
Ce système est vraiment flexible puisqu’il peut permettre de ne faire circuler des unités multiples que sur la partie centrale de la ligne, là où se concentre le pic de passager, voire de secourir une rame arrêtée en tunnel automatiquement ou manuellement.
La circulation en unité multiple a commencé à être testées en conditions réelles d’exploitation sur la ligne D en septembre 2016. Le système est en cours d’ajustement car il n’avait jamais été utilisé précédemment et devrait servir en conditions réelles à partir de 2019.
Intérêt du CMD
Je vous disais tout à l’heure que l’intérêt du CMD tel qu’exploité sur la ligne D était plutôt limité sauf dans certain cas très précis. La composition en unité multiple en est un. En effet, pour s’accoster, une rame doit se rapprocher très près d’une autre rame à l’arrêt jusqu’à rentrer en contact avec elle. Ceci n’est pas "naturel" pour le pilote automatique et plus particulièrement l’anti-collision. Lors de cette manœuvre, dans le cas de cantons fixe, on autorise une seconde rame à rouler dans un canton déjà occupé mais à faible vitesse (3km/h) afin qu’une collision éventuelle ne soit pas dangereuse. Cela implique qu’il faut 4 min pour parcourir un tronçon de 150m, faisant ainsi perdre beaucoup de temps sur l’exploitation de la ligne. Avec un canton mobile, La vitesse de la rame diminue proportionnellement à la distance la séparant de la rame à l’arrêt et ne roule à 3km/h que sur les 10 derniers mètres. On fait donc ici une énorme économie de temps!
Fonctionnement concret d’une rame en unités multiple
Lorsque une rame est en unité multiple, chaque unité continue à fonctionner de manière très semblable à la conduite en unité simple. En effet, les deux unités continuent de calculer leurs données de fonctionnement séparément et se communiquent les résultats afin de déclencher un freinage d’urgence en cas d’incohérence. Les seules différences sont que la rame de derrière voit son anti-collision inhibé car est arrimée à une autre rame et que c’est l’unité de devant qui commande l’ouverture et la fermeture des portes.
En cas de secours d’une rame en ligne, c’est la rame arrière qui pilote l’unité multiple.
Conclusion sur le fonctionnement en unité multiple
Bien que prévu dès le début de la conception de MAGGALY, il n’a encore jamais été exploité car bien qu’augmentant la capacité d’une rame, il réduit le nombre de rames en circulation. De plus, jusqu’à présent, la demande ne le justifiait pas. Le nombre de voyageurs ayant depuis augmenté, Des tests sont donc réalisés de nuit pour le mettre en place et ajuster le fonctionnement de l’ensemble pour pouvoir l’exploiter pleinement. Des essais ont étés conduis en septembre 2016 avec des voyageurs. Ce système est l’une des seules applications détournées d’ARAMIS. Toutefois, certains projets novateurs voire utopiques comme celui de l’entreprise Next en reprennent des principes.
Fonctionnements en mode dégradé
Pour pallier les pannes, l’ensemble du système ou presque est redondé. Par exemple, chaque UGTS de ligne est en fait doublée d’une UGTS en veille prête à prendre le relais en cas de panne de l'UGTS principale. De plus, de nombreuses télémesures sont transmises au PCC afin de pouvoir résoudre les problèmes le plus tôt possible. Toutefois, des pannes peuvent toujours se produire.
En cas de panne de l'UGE d’une rame, celle-ci peut être automatiquement secourue par une rame opérationnelle afin qu’elle finisse son parcours, avant d’être mise au garage et réparée. La reprise en manuelle d’une rame est également possible en unité simple ou multiple, via l’une des consoles présente à chaque extrémité du train. Celles-ci sont d’ordinaire masquées sous un couvercle fermé à clé. Toutefois, la reprise en manuelle impose une vitesse d’exploitation plus faible.

Actuellement, lors d’une reprise en manuel, l’ensemble des passagers est évacué. Cependant, la conduite manuelle en exploitation est à l’étude.
En cas de panne d’un SQV, un agent de ligne peut-être envoyé sur place pour assurer la sécurité le temps de la réparation. Chaque station est équipée d’un boîtier permettant à un agent de ligne de la gérer en cas de panne. On y trouve notamment un microphone et un voyant avertissant de l’arrivée d’un train en station. Lorsque le SQV est déconnecté, l’agent de ligne doit appuyer sur un bouton de type homme mort11 à partir du moment ou le voyant s’allume et jusqu’à l’ouverture des portes de la rame, puis de la fermeture des portes jusqu’à la disparition de la rame. S’il relâche le bouton, la rame enclenchera immédiatement un freinage d’urgence.
De manière générale, en cas de panne d’une rame, celle-ci peut être garée dans l’arrière gare de l’un des terminus en attendant la fin de la journée d’exploitation avant d’être ramenée au dépôt par un agent de ligne. Des rames de secours sont toujours positionnées en arrière gare pour prendre le relais dans ce cas-là.
- C’est un métro de gabarit inférieur à la ligne D.↩
- Ce sont des portes se trouvant entre le quai et la voie pour empêcher l’accès au tunnel.↩
- Aujourd’hui absorbée par Siemens.↩
- Celui-ci se situe dans le quartier de la Part-Dieu dans le 3ième arrondissement.↩
- Une section électrique couvre deux stations en moyenne.↩
- En utilisant la force électro-motrice du moteur, on peut le freiner en utilisant l’énergie que celui-ci crée en fonctionnant en générateur. Cette énergie peut alors être envoyé dans le réseau si un autre train accélère à ce moment-là. Sinon, des freins à plaquettes conventionnels sont utilisés.↩
- Source↩
- Certaines stations comme celle de Bellecour sont à quai central alors que la majorité des stations sont à quais latéraux.↩
- Une roue phonique permet de mesurer l’angle de rotation de la roue et donc de connaître la distance parcourue par le train.↩
- Si ARAMIS vous intéresse davantage, vous pouvez consulter sa page wikipédia.↩
- Ce type de bouton sert à vérifier s’il y a bien quelqu’un de présent pour s’assurer que tout ce passe comme il faut. il est nécessaire d’appuyer dessus en permanence ou très régulièrement pour signaler au système qu’on est bien là est pas endormi par exemple.↩
Conclusion
Lors de son inauguration en 1992, la ligne D était révolutionnaire et vraiment novatrice sur de nombreux points. Encore aujourd’hui, certains systèmes comme le pilotage automatique en unités multiples sont presque encore inégalés. Son système de pilotage automatique très fiable et d’un grand niveau de sécurité a pu empêcher un grand nombre d’accidents même si certains comportements à risques peuvent toujours le mettre en défaut, tout comme un conducteur humain. Sur de nombreux points, on peut même dire qu’il est plus fiable qu’un métro en pilotage semi-automatique1. Cependant, les rames commençant à être âgées et les unités informatiques gérant le pilote automatique obsolètes, il est prévu de remplacer l’ensemble.
Le Sytral a lancé un appel d’offres pour remplacer la moitié de rames des lignes B et D2, et un second appel d’offres pour réaliser un nouveau pilote automatique qui équipera dans un premier temps la ligne B puis remplacera MAGGALY sur la ligne D. Ce nouveau pilote automatique devra être plus souple dans sa gestion des incidents et être compatible avec l’ancien matériel qui sera encore en circulation. De plus, il devra prévoir une exploitation ultérieure avec des portes palières. En effet, le SQV suffit actuellement et sera conservé mais TCL veut se garder la possibilité d’installer des portes palières pour le jour ou le flux de voyageur sera tel que le SQV ne soit plus suffisant.
Toutefois, aujourd’hui, les pilotes automatiques de métro sont régis par des normes ISO qui n’existaient pas lors de la conception de MAGGALY et, par exemple, la fonctionnalité d’accostage scindage ne fait pas partie de cette norme. Une incertitude existe donc quant à sa présence dans le nouveau pilote automatique.
Alstom a annoncé le 26 octobre 2016 avoir remporté l’appel d’offres concernant la nouvelle génération de métros3. Ils fourniront les nouvelles rames, qui seront adaptées à partir du modèle Metropolis d’Alstom. Elles équiperont d’abord la ligne B et remplaceront ensuite une partie de celles de la ligne D.
Le 31 janvier 2017 Alstom a également remporté l’appel d’offre concernant la partie pilotage automatique du nouveau métro4. Le nouveau système sera basé sur la solution Urbalis 400, le système CBTC de dernière génération d’Alstom. La possibilité de circuler en unités multiples sera conservée par ce nouveau système.
J’espère que cet article aura su vous faire découvrir les particularités de la ligne D. Il ne fait que gratter la surface tant le système est complexe, mais j’espère qu’il aura su vous rendre plus curieux sur MAGGALY. Pour ceux qui voudraient trouver d’autres informations sur la ligne D et les transports par rails lyonnais, vous pouvez consulter le site ferro-lyon.net qui m’a permis de découvrir MAGGALY. Vous pouvez également consulter la playlist actualités du métro D sur la chaîne youtube de TCL. Je remercie également les employés de Keolys Lyon qui ont pris le temps de répondre à mes nombreuses questions sur le fonctionnement du métro D et transmis de nombreux documents.
L’image servant de logo à l’article est sous licence CC BY-SA 3.0, crédité à Billy69150.
Si vous avez des remarques ou des questions, n’hésitez pas, je me ferais un plaisir de répondre dans la mesure de mes connaissances.
- Dans la plupart des métros avec conducteur (y compris les lignes A, B et C du réseau Lyonnais), le conducteur a essentiellement pour rôle de s’assurer du bon fonctionnement de la rame et de la sécurité des usagers. Il conduit réellement le métro qu’en cas d’incident technique et quelques heures par jour afin de conserver son savoir-faire.↩
- Les rames sont remplacées par moitié tous les 20 ans.↩
- Source.↩
- Source.↩